Tree climbing method
A technology for climbing tree claws and trees, which is applied in the field of climbing equipment, and can solve problems such as inflexible fixing methods around tree trunks and poor adaptability of tree surfaces.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
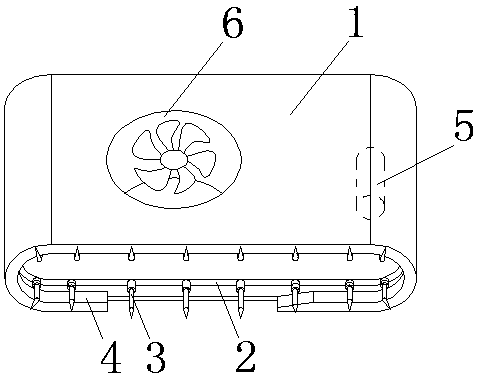
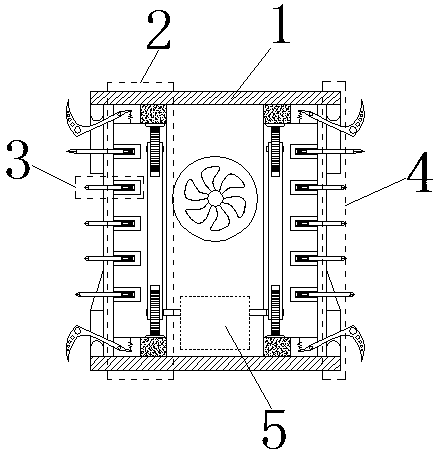
[0099] A kind of tree-climbing robot disclosed in this embodiment combines figure 1 and figure 2 As shown, it includes a housing 1, a transmission belt 2, a tree climbing claw 3, a limit ring 4, a transmission belt driving member 5 and a pressure member 6. The housing 1 includes: a bottom surface in contact with the tree body surface, and a top surface opposite to the bottom surface , two sides parallel to the axis of the tree body on both sides of the bottom surface, a cavity for accommodating the internal structure is provided between the two sides of the housing 1, and a transmission belt 2 is arranged in the cavity, and the transmission belt 2 runs along the tree body. The axial direction is arranged, and the transmission belt 2 is driven to rotate through the transmission belt driver 5 inside the cavity, and several tree climbing claws 3 are arranged on both sides of the transmission belt 2, and several tree climbing claws 3 are arranged at equal intervals along the tran...
specific Embodiment approach 2
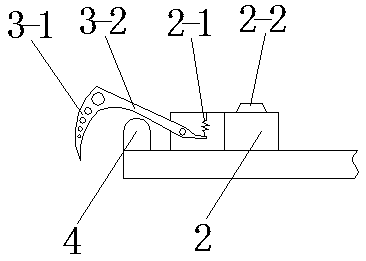
[0107] This embodiment is based on the specific implementation mode 1, specifically, in combination with image 3 As shown, the claw body 3-1 of the tree-climbing claw 3 is arc-shaped, and the center of the arc-shaped circle falls on the hinge shaft where the tree-climbing claw 3 and the transmission belt 2 are hinged;
[0108] It is convenient for the tip of the claw body 3-1 to penetrate into the tree body for fixing.
specific Embodiment approach 3
[0109] This embodiment is based on the specific implementation mode 1 or 2, specifically, in combination with Figure 5 As shown, the transmission belt driver 5 includes: a driving motor 5-1, a driving wheel 5-2, a frame body 5-3 and a driven wheel 5-4, the transmission belt 2 is sleeved outside the frame body 5-3, and the frame body The body 5-3 provides support for the transmission belt 2, and the two ends of the frame body 5-3 are respectively provided with a driving wheel 5-2 and a driven wheel 5-4, and the driving wheel 5-2 and the driven wheel 5-4 are connected with the synchronous teeth. 2-2 meshing, the driving wheel 5-2 is connected with the drive motor 5-1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com