

Industrial robot built-in wire harness wear and accelerated wear test method and device
A technology of industrial robots and testing methods, which is applied in the direction of measuring devices, testing wear resistance, instruments, etc., can solve problems such as not considering wiring harnesses, being unable to achieve integration, intelligence, integration, and ignoring the complex wear and tear of wiring harnesses
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings.
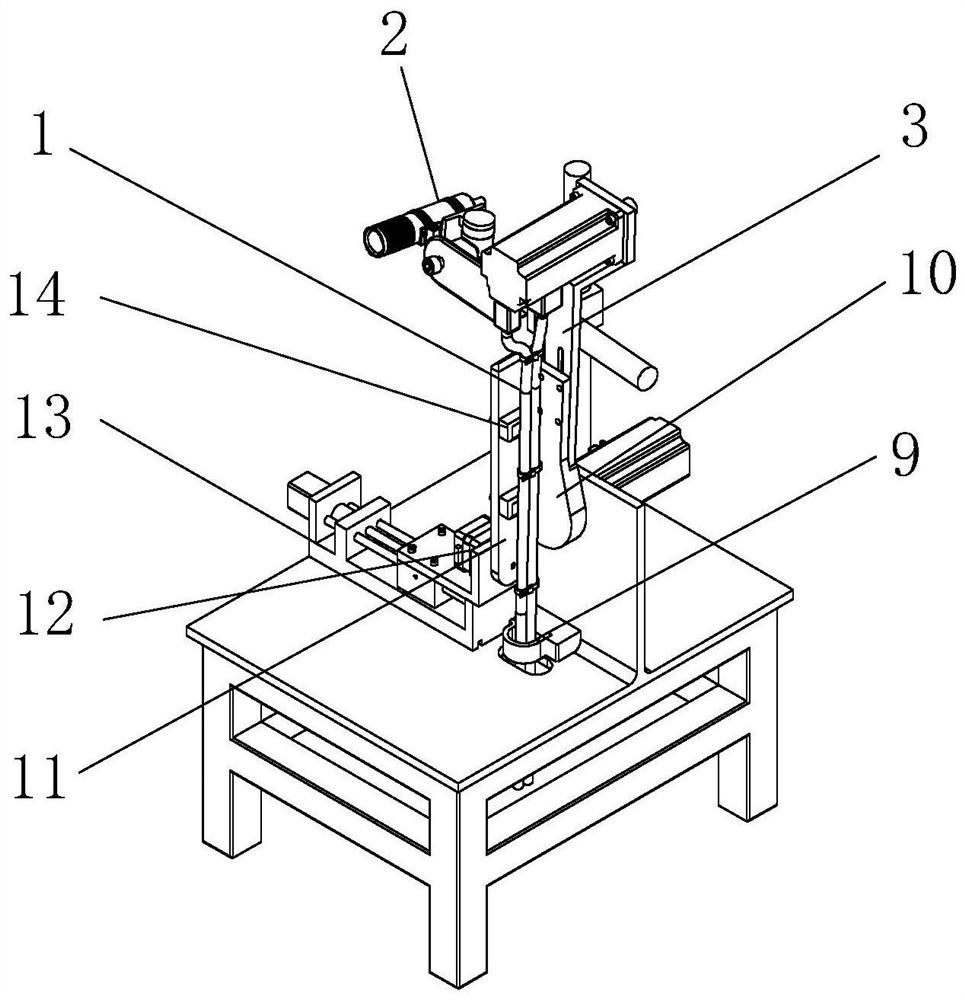
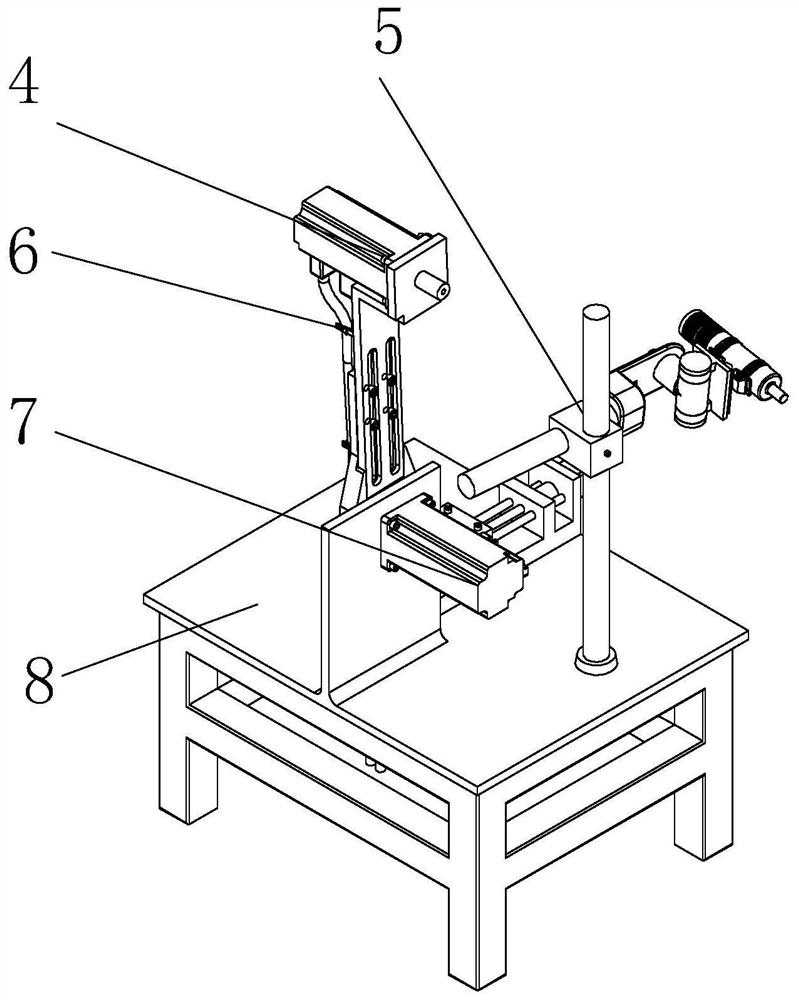
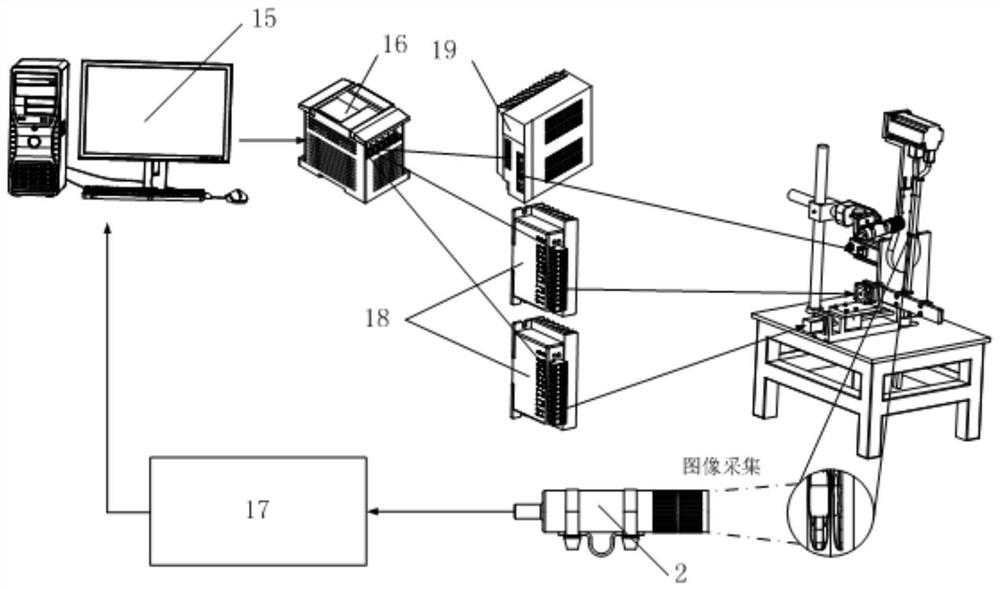
[0033] Such as figure 1 , 2 As shown in and 3, the built-in wire harness wear and accelerated wear test device for industrial robots mainly consists of multi-wire harness 1, camera 2, simulated mechanical arm 3, wire harness joint motor 4, camera spatial position adjustment device 5, multi-wire harness binding device 6, swing Motor 7, mounting base 8, hoop 9, swing arm 10, analog board 11, analog board swing and rotation device 12, analog board mobile platform 13, industrial computer 15, motor motion controller 16, swing motor driver 19, stepper motor The driver 18 and the image acquisition card 17 are composed.
[0034] The swinging and rotating device 12 of the simulation board comprises a swing angle motor and a connecting plate; the output shaft of the swing angle motor is fixed with the bottom end of the simulation board 11, and if the inside of the mechanical a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More