

Double-wheel self-balance robot
A self-balancing, robot technology, applied in the field of robots, can solve the problems of poor climbing performance and single function, and achieve the effect of improving the adaptability of the road surface
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] A kind of two-wheel self-balancing robot provided by the invention comprises the following components:
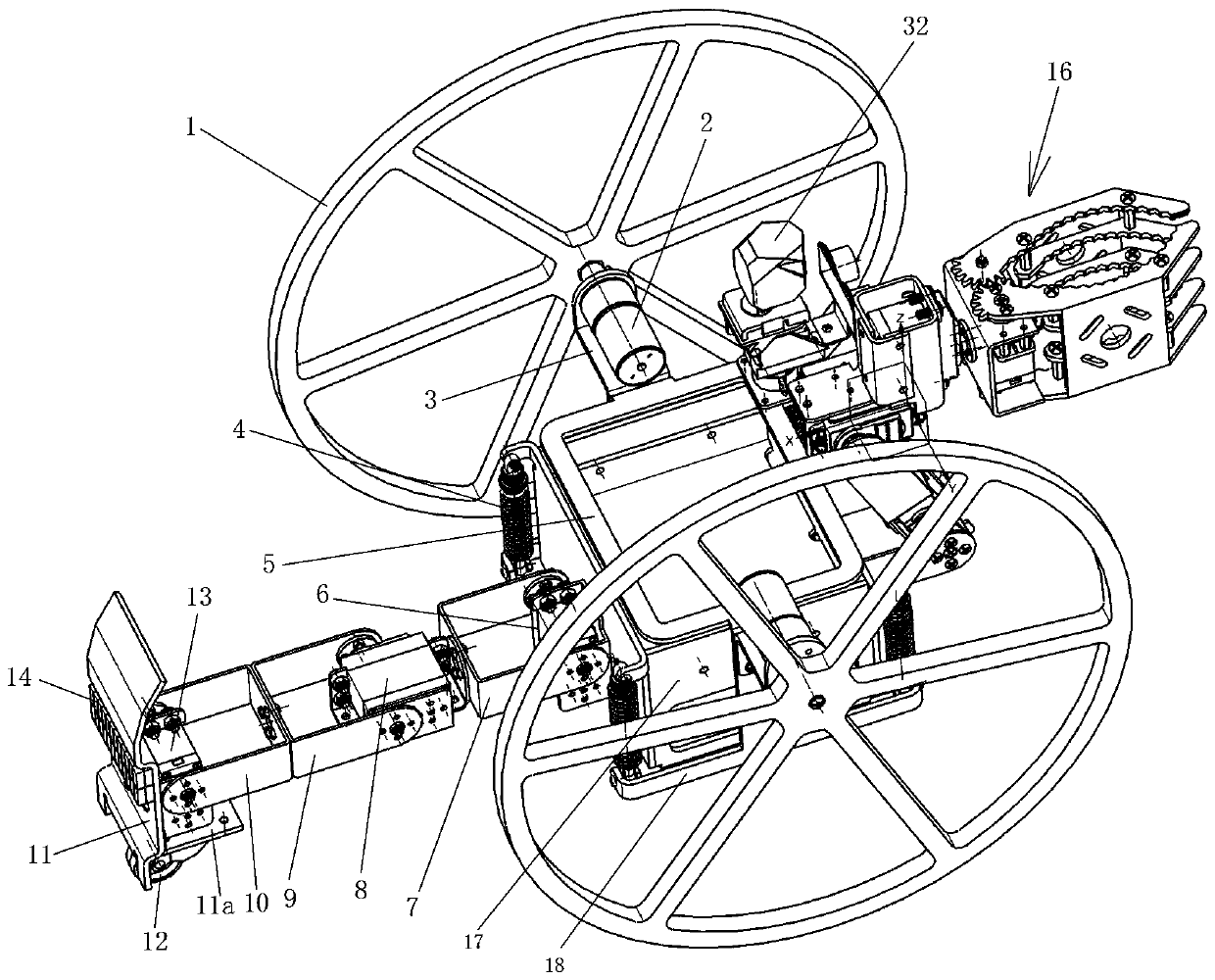
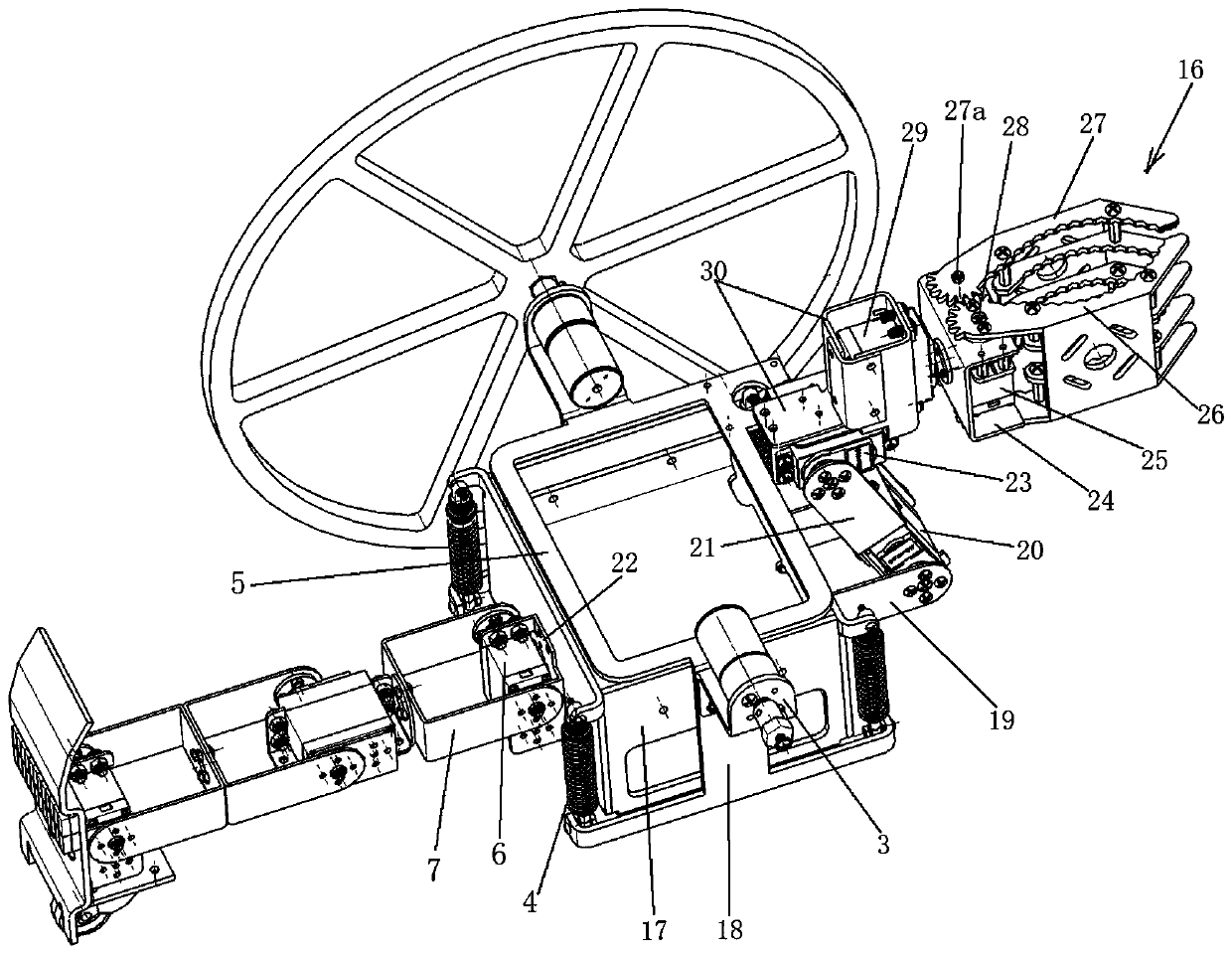
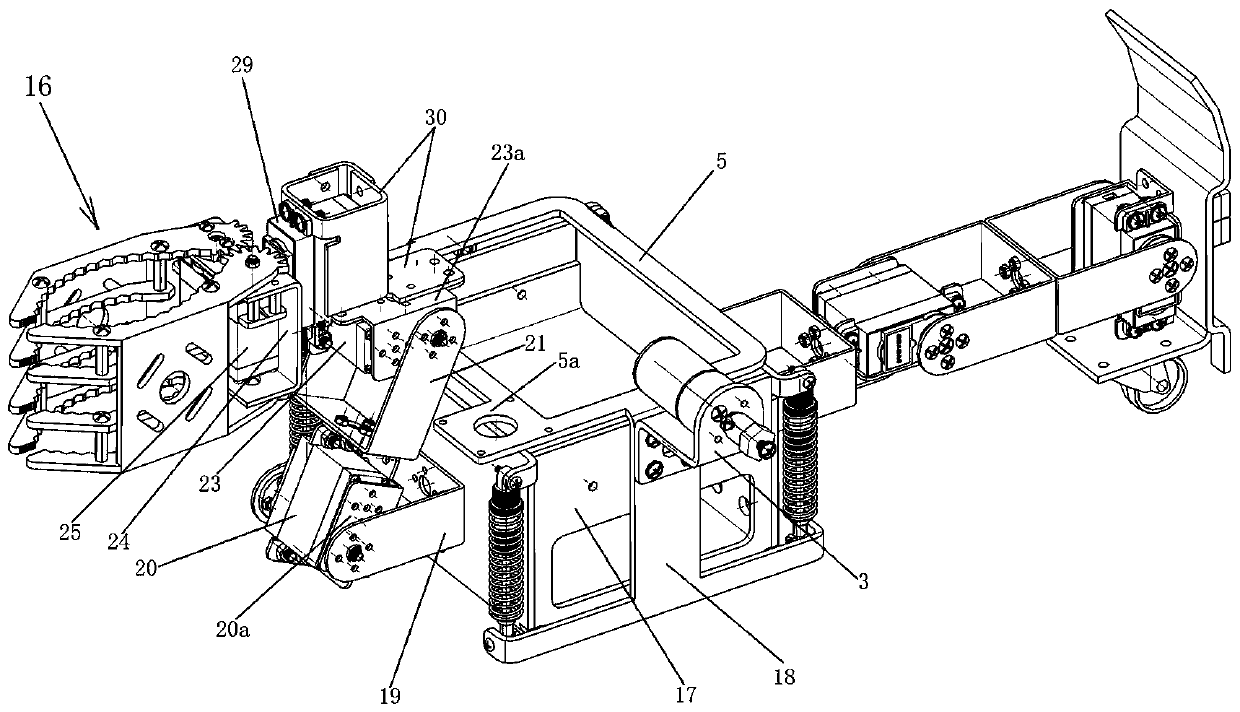
[0024] a. If figure 1 , figure 2 As shown, including vehicle axle 5, it is made up of rectangular frame, mainly plays the role of carrying the weight of the robot and delivering it to the walking wheels on both sides. A motor support 3 higher than the vehicle axle is respectively arranged at both ends of the vehicle axle. Each motor support 3 is connected to the reduction motor 2, and the output shaft of the reduction motor 2 is connected to the road wheel 1. Robot parts are included as a whole.
[0025] b. If figure 1 , figure 2 As shown, a spring support 18 lower than the vehicle bridge is respectively arranged at the two ends of the vehicle bridge, and it is in an inverted T shape. . A box body 17 is arranged under the axle, and the four corners of the upper end of the box body 17 are respectively connected with corresponding spring shock absorbers. Obviou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More