

Self-inspecting method and self-inspecting system for robot and computer storage medium
A technology of robots and detection methods, applied in the field of robotics, can solve the problems of inability to judge the execution success of the execution equipment, wrong detection distance data, and inability to fully judge whether the sensor equipment is normal, so as to reduce labor costs, increase detection, and avoid major accidents. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The specific implementation manner of the present invention will be further described in detail below with reference to the drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
[0029] Firstly, the robot self-inspection method 100 according to the embodiment of the present invention will be described in detail with reference to the accompanying drawings.
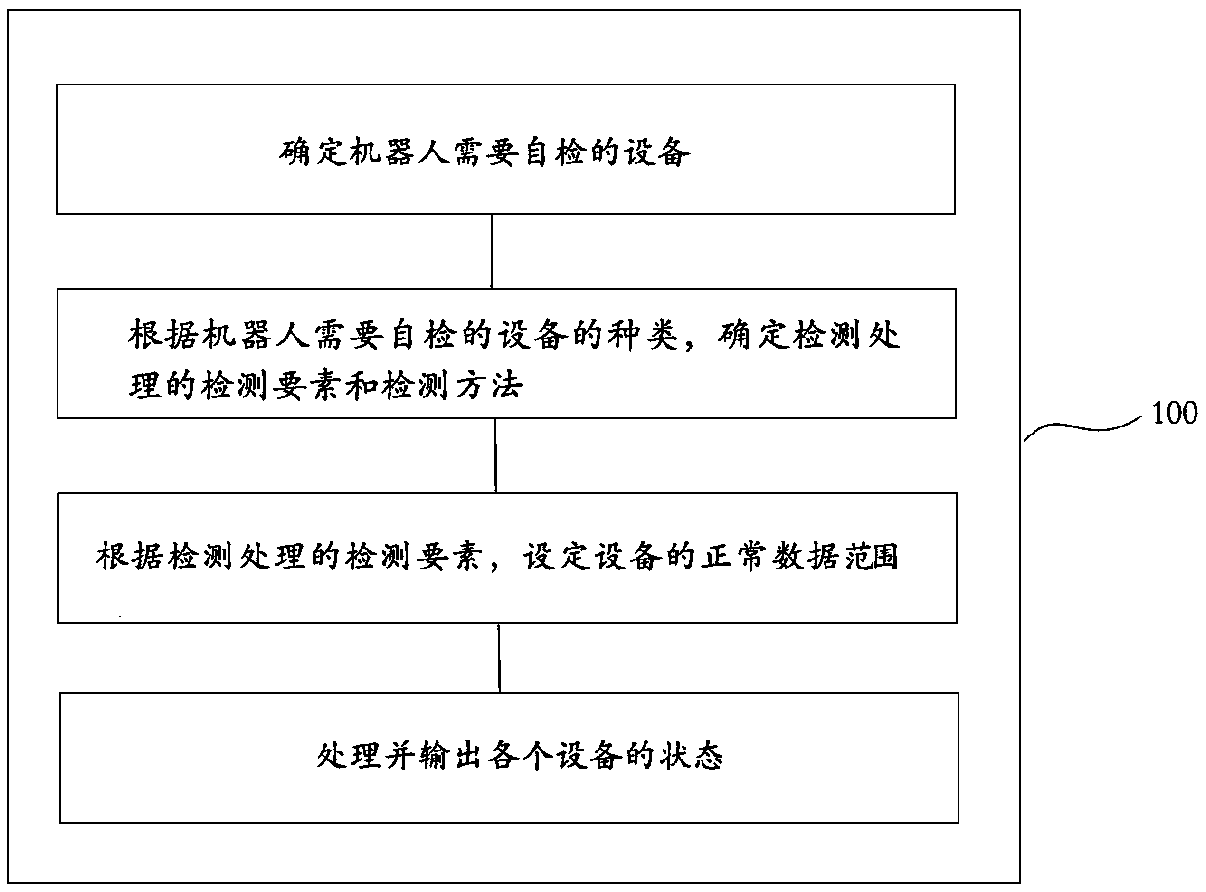
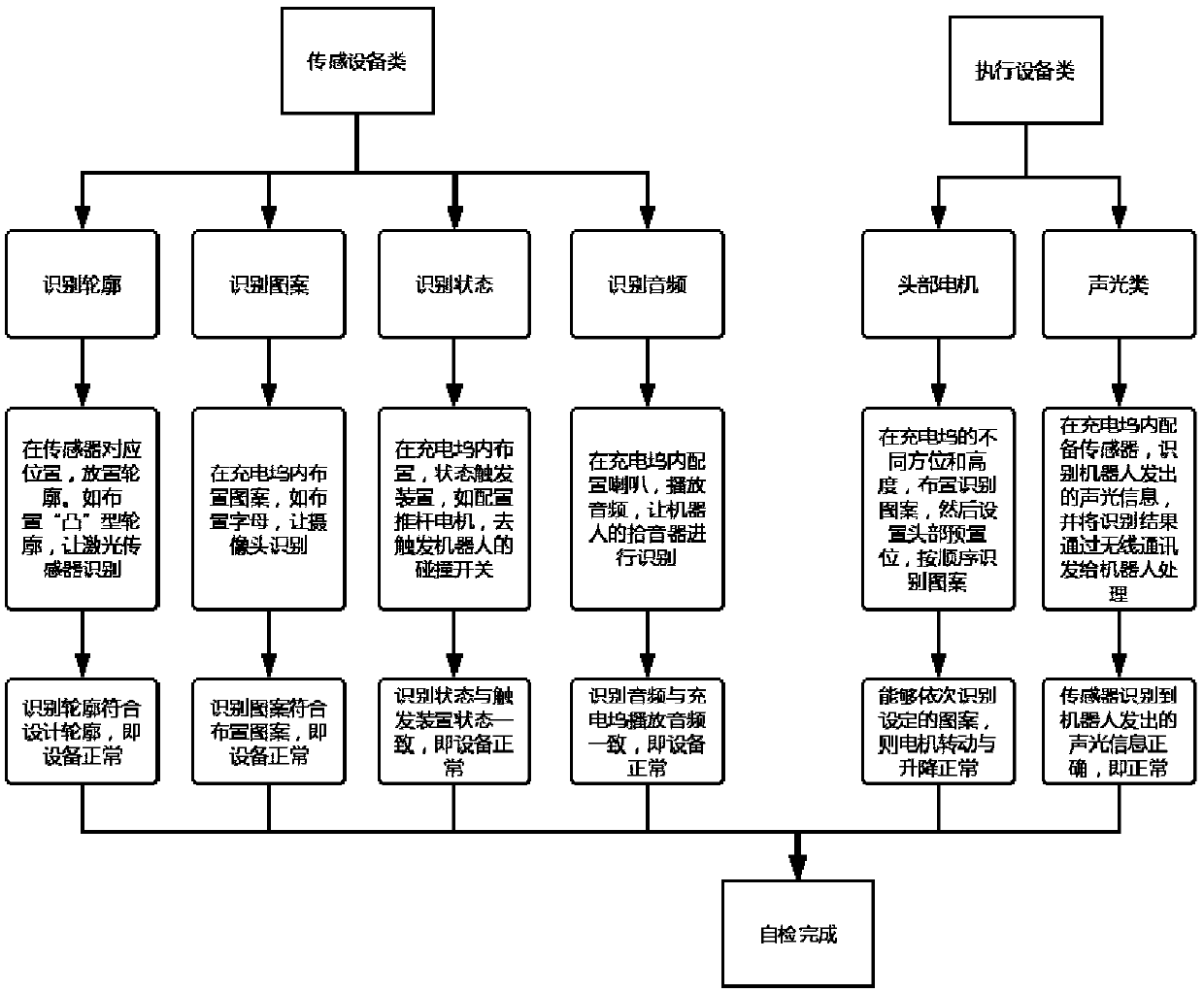
[0030] Such as figure 1 and figure 2 As shown, the self-inspection method 100 of the robot according to the embodiment of the present invention includes:
[0031] Identify the equipment that the robot needs to self-test.
[0032] According to the type of the device that the robot needs to self-inspect, determine the detection elements and detection methods of the detection process.
[0033] According to the detection elements of the detection processing, the normal data range of the device is set.
[0034...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More