

A lane line detection method based on a deep segmentation network
A technology of lane line detection and depth segmentation, which is applied in biological neural network models, instruments, character and pattern recognition, etc., can solve problems such as changes, and achieve improved robustness, efficient lane line detection algorithms, good robustness and real-time effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
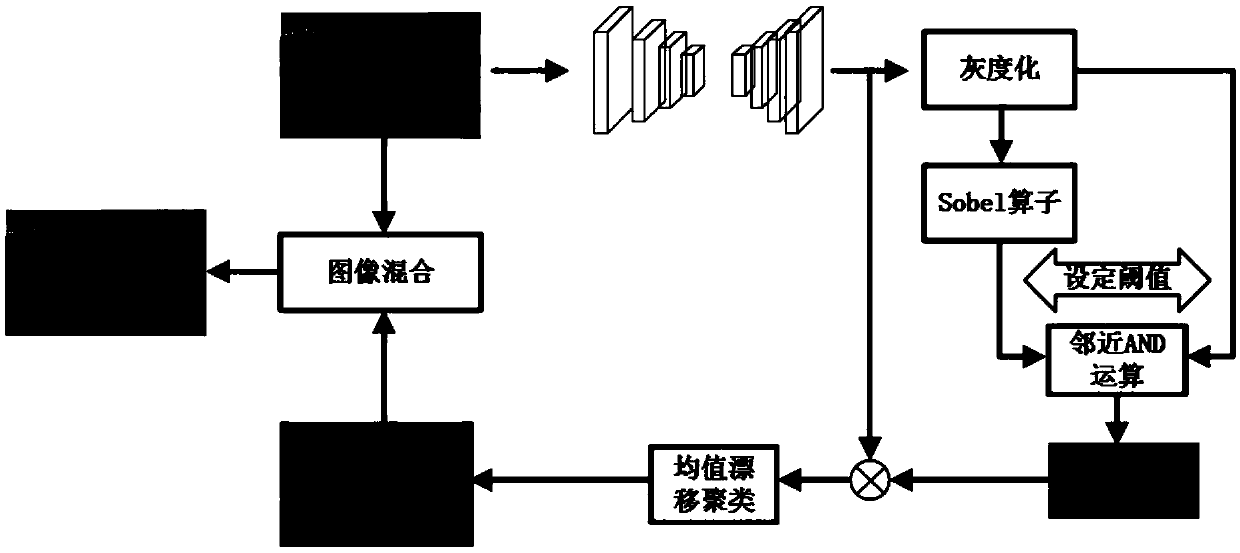
[0029] In this example, if figure 1 As shown, a lane line detection method based on deep segmentation network is carried out as follows:
[0030] Step 1. Obtain the original image set with the label of each lane line from the Tucson database; use the python language and use the third-party library opencv to set the corresponding gray value for the lane line label on any i-th original image ( The gray value of the first lane line label is set to 220, the gray value of the second lane line is reduced by 50, and so on), and the background gray value of the i-th original image is set to zero, thus obtaining the i-th A grayscale image of a lane line example, for example image 3 As shown, the i-th original image and the i-th lane line instance segmentation grayscale image are normalized to 512×256 to obtain the i-th original image and the i-th lane line instance segmentation after normalization Grayscale image; thereby obtaining the normalized original image set and the grayscale...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More