

Unmanned aerial vehicle positioning method based on a cooperative two-dimensional code of a virtual simulation environment
A technology of virtual simulation and positioning method, applied in the field of visual navigation, which can solve problems such as inconsistent camera positioning requirements, and achieve rapid results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, and the present invention includes but not limited to the following embodiments.
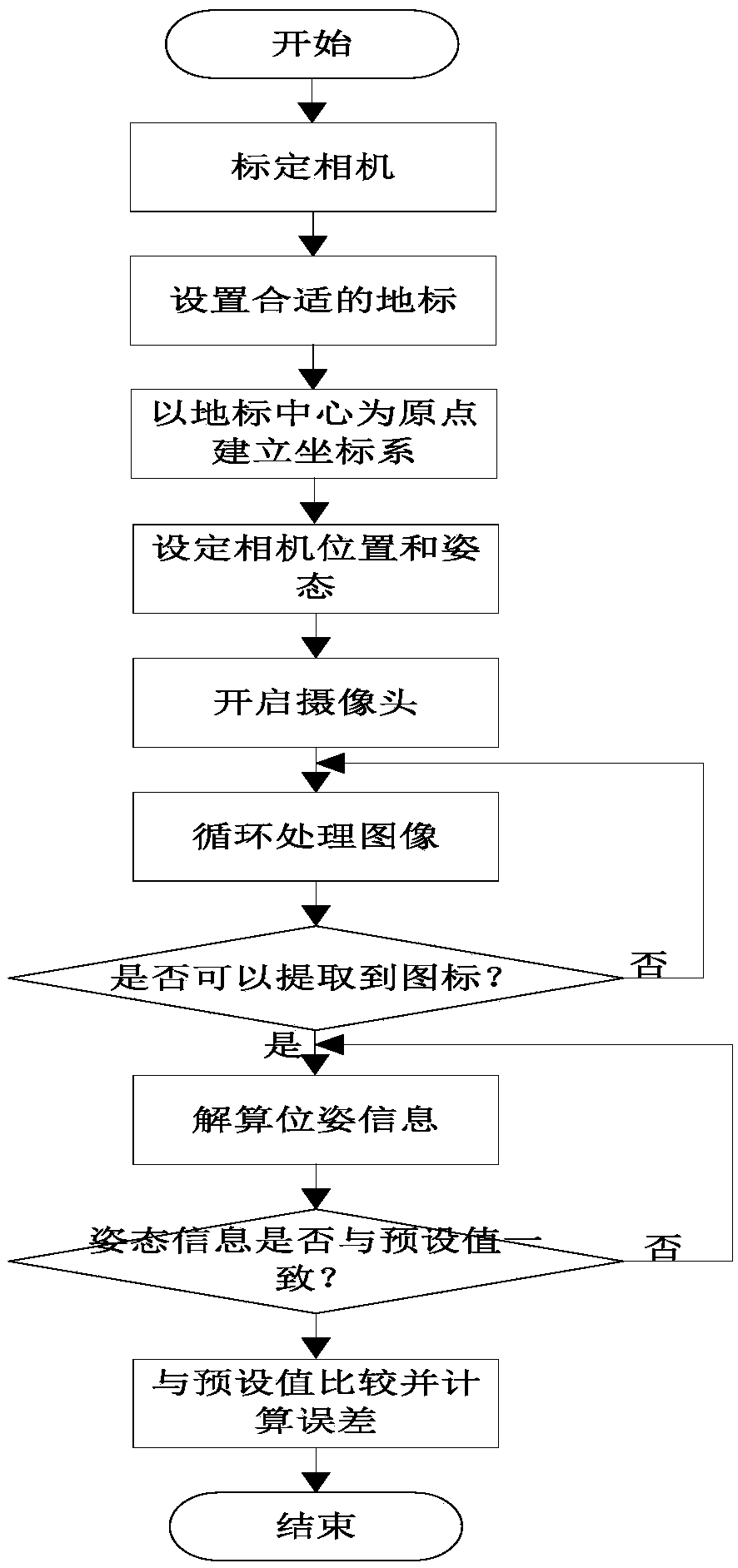
[0021] The invention solves the positioning problem of the rotor UAV in a complex flight environment by obtaining the cooperative two-dimensional code image in the environment to solve the position parameters of the UAV and verify the availability of the algorithm in the virtual environment.
[0022] The main task of visual navigation and positioning is to map the 3D camera coordinate system to the world coordinate system according to the matching results between the scene pixels. The basic process can be simplified as how to transform the scene plane coordinates into inertial coordinates, and this process can be carried out by the following formula describe:
[0023]
[0024] Among them, u and v are scene plane coordinates, x w 、y w ,z w Inertial coordinates are prov...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More