

Ankle joint rehabilitation robot
A rehabilitation robot and ankle joint technology, applied in the field of medical rehabilitation engineering, can solve the problems such as the inability to realize the coincidence of the rotation center of the mechanism and the ankle joint motion center, the inability to meet the requirements of ankle joint rehabilitation training, and the inability of the training mode to meet the needs of human body structure, etc. Achieving the effect of good rehabilitation effect, quick response and high control precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The technical solutions in the present invention will be described in detail, clearly and completely below in conjunction with the accompanying drawings in the present invention. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
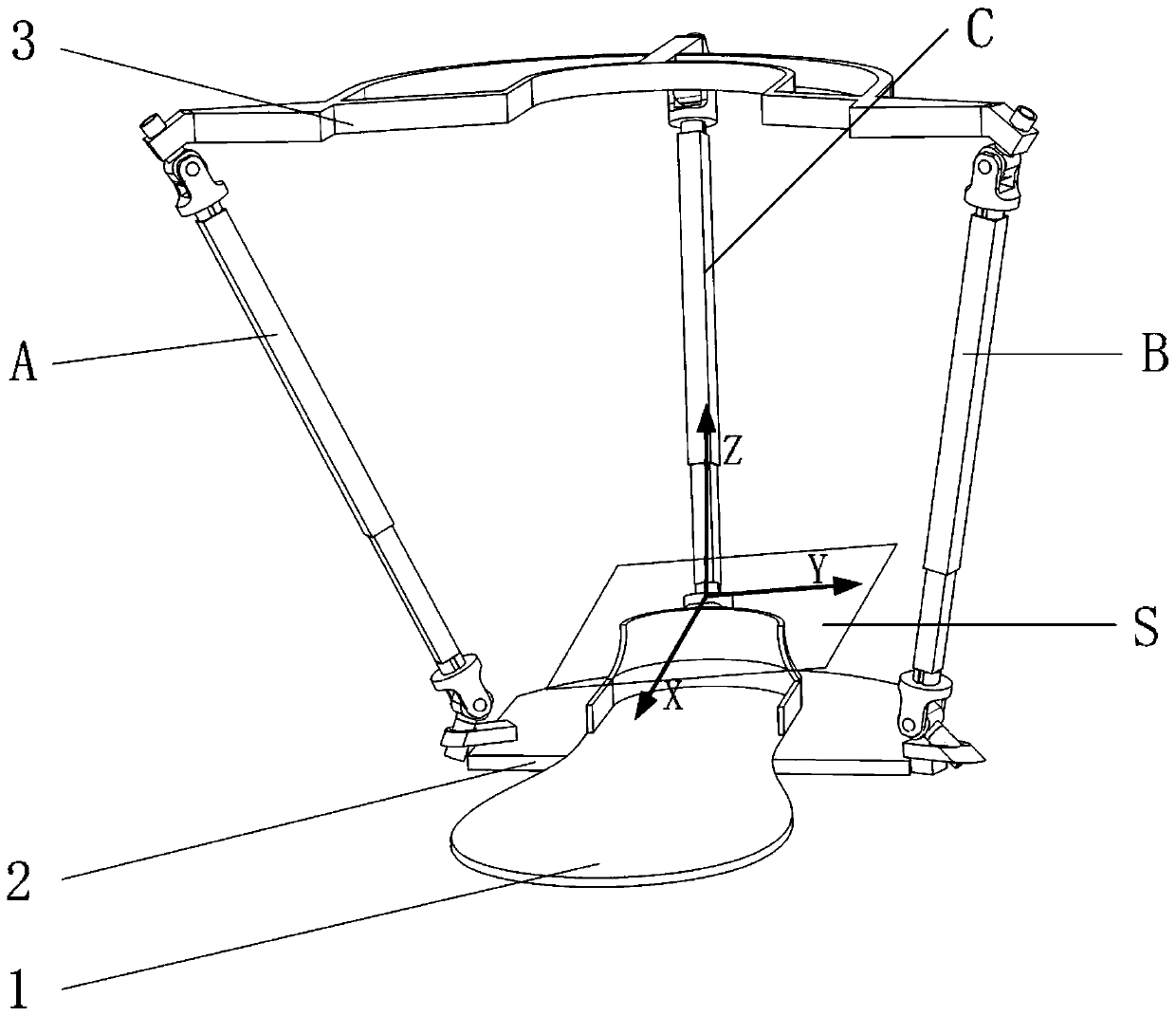
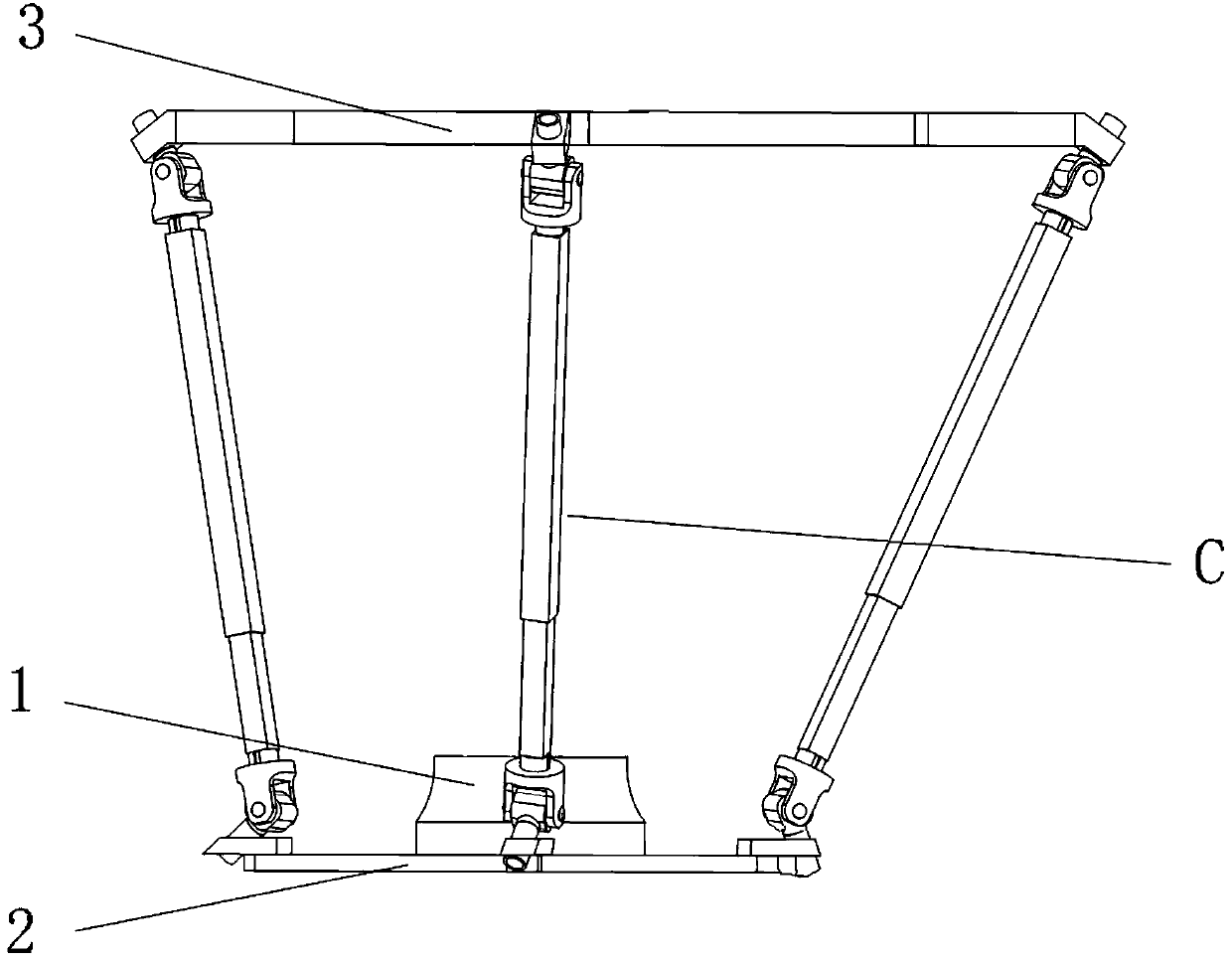
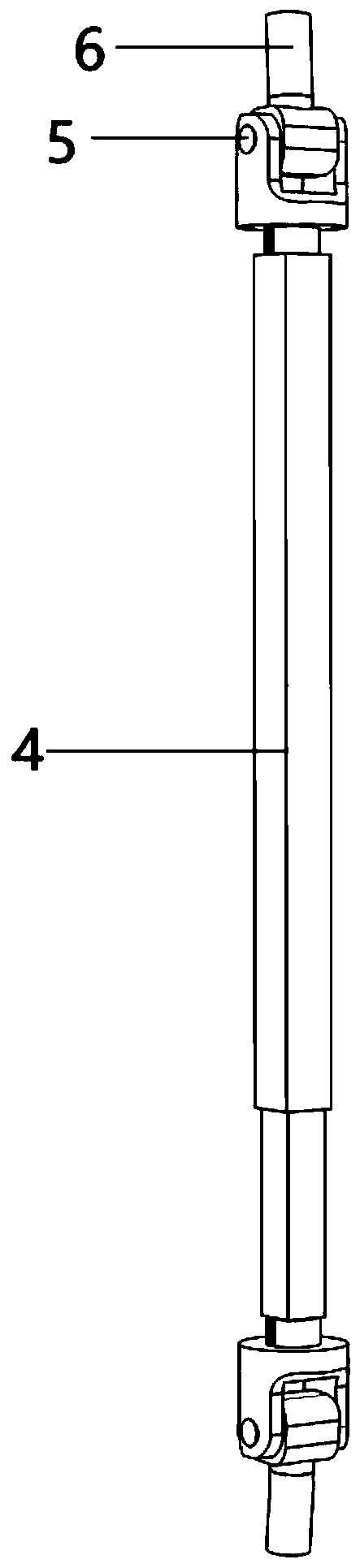
[0019] Such as Figure 1-3 As shown, the present invention describes an ankle joint rehabilitation robot, which includes a moving platform 2, a fixed platform 3 and a kinematic branch chain. ; The rotation axes of the two second revolving pairs fixed on each kinematic branch chain intersect at one point, and the three kinematic branch chains form three points, and the plane formed by these three points is the movement plane S of the mechanism, which can realize the movement...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More