

A pose measurement method combining initial pose measurement with target tracking
A technology of target tracking and pose measurement, applied in the field of target tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
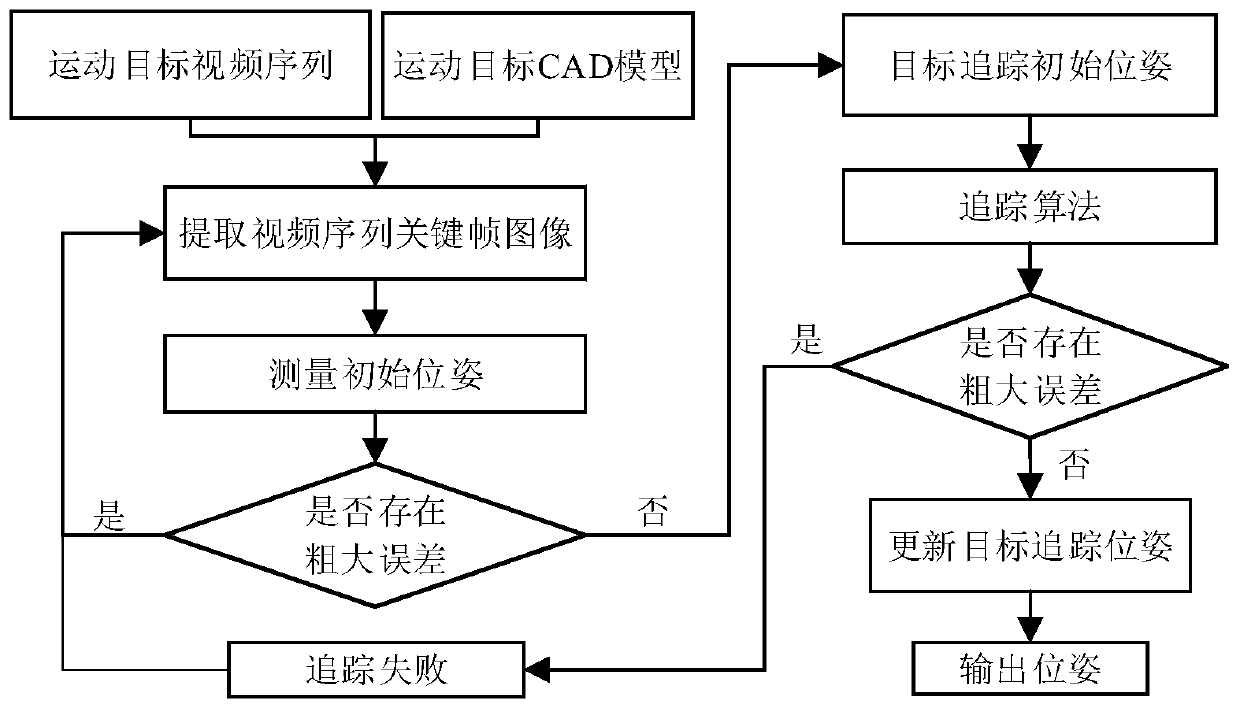
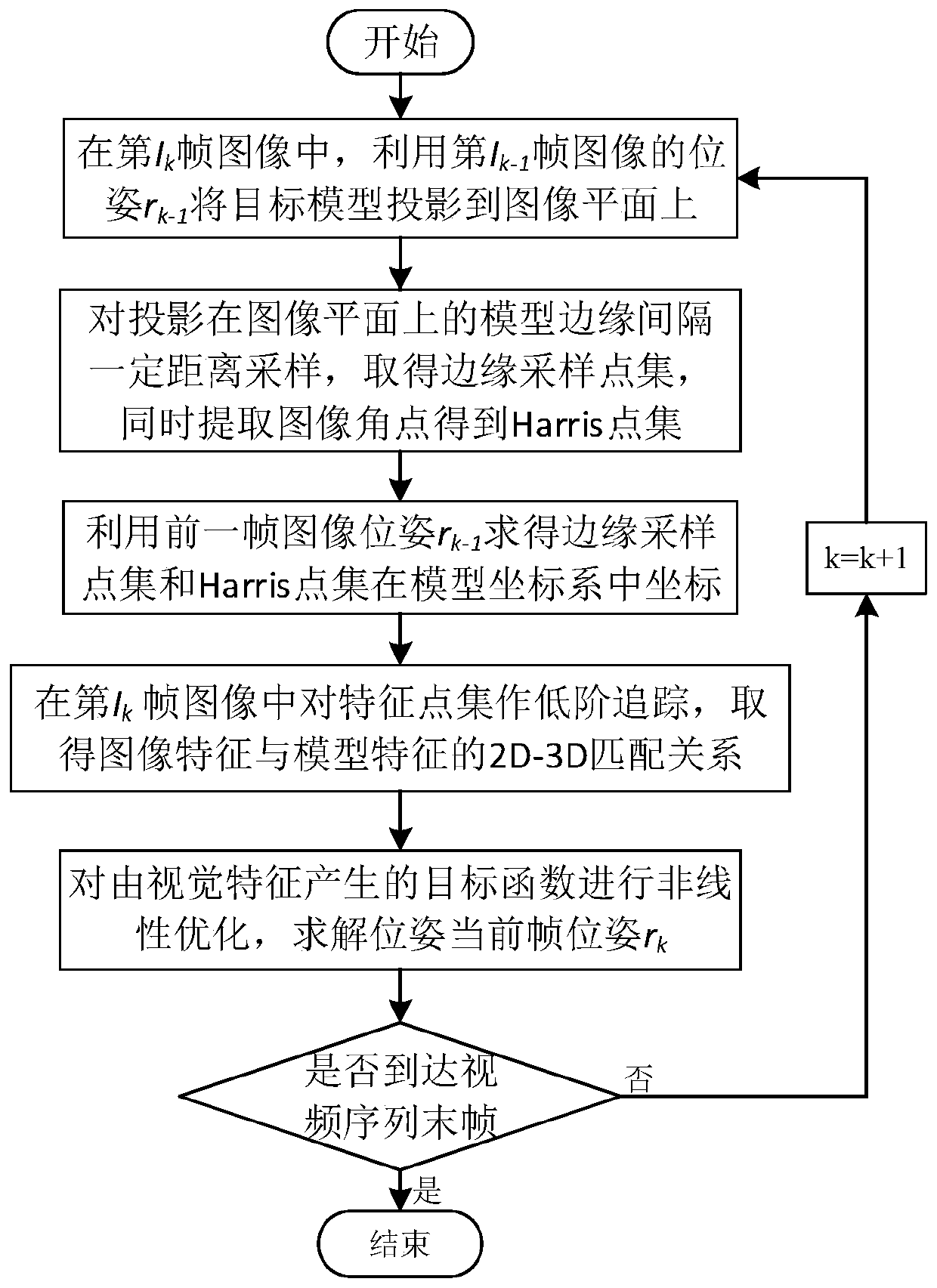
[0097] Specific implementation mode one: this implementation mode combines Figures 1 to 4 , the pose measurement method of initial pose measurement combined with target tracking in the present invention is described as follows:
[0098] 1 Initial pose measurement of the target
[0099] The initial pose measurement of the target is used to start the subsequent target tracking and realize the real-time output of the pose parameters. The process of initial pose measurement of the target is essentially the process of detecting and locating the target in a three-dimensional environment.
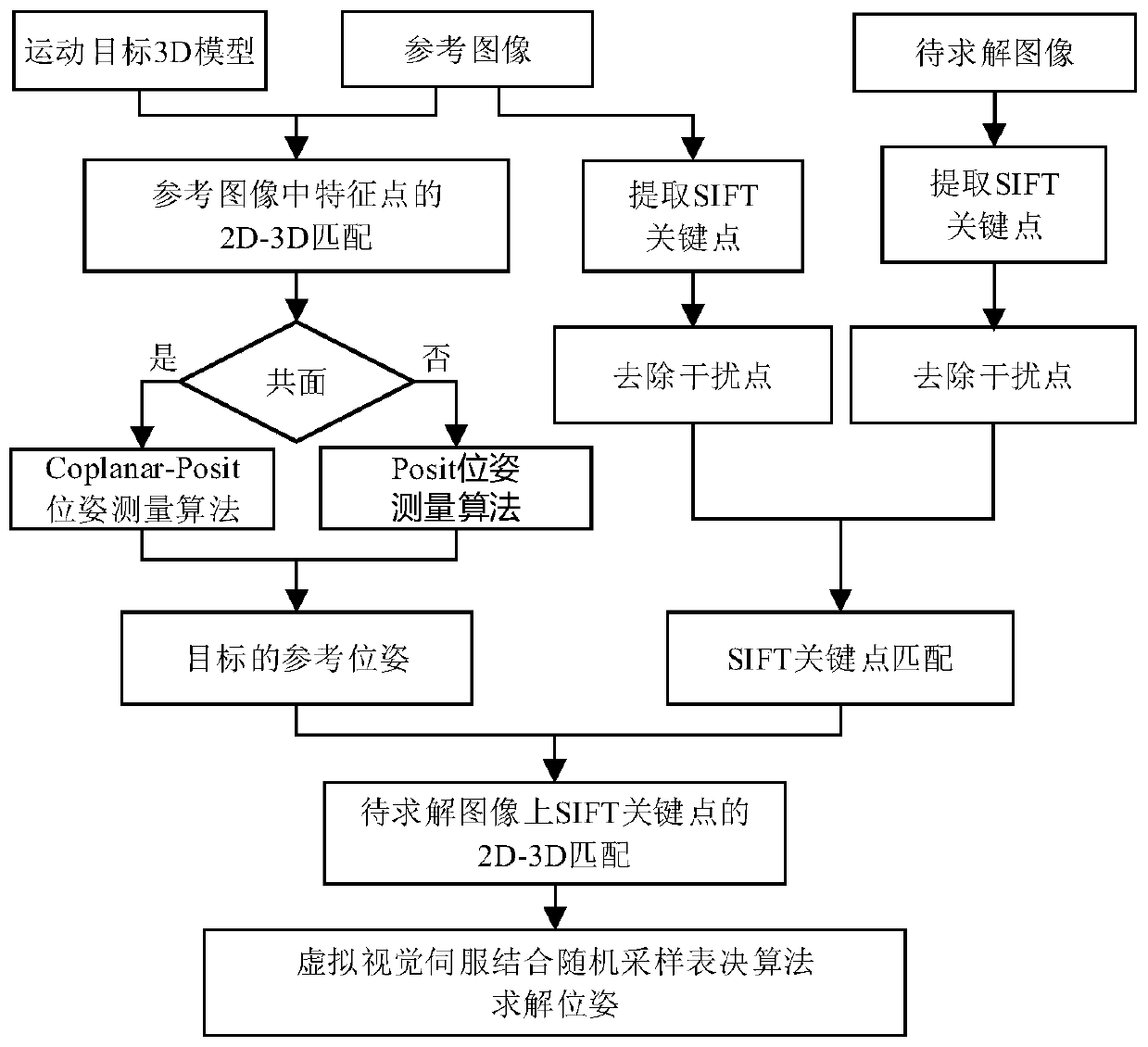
[0100] (1) Measurement of reference pose
[0101] In order to measure the initial pose of the moving target, it is necessary to extract a frame of image as the reference image for the initial pose measurement, and use this reference image to measure the pose parameters of the target in the measured image. The present invention adopts the POSIT pose solving algorithm to solve the reference pose,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More