

An autonomous navigation system for a miniature underwater detection robot
An autonomous navigation system and underwater robot technology, applied in three-dimensional position/channel control and other directions, can solve the problem of divergence in positioning accuracy of the navigation system, and achieve the effects of light weight, low price, and small hardware volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
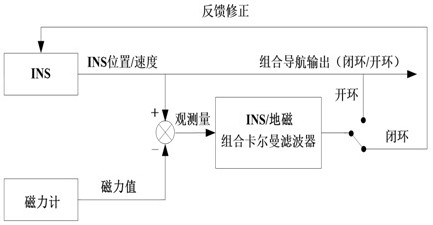
[0057] The present invention provides such as figure 1 A miniature underwater exploration robot autonomous navigation system shown in , including:
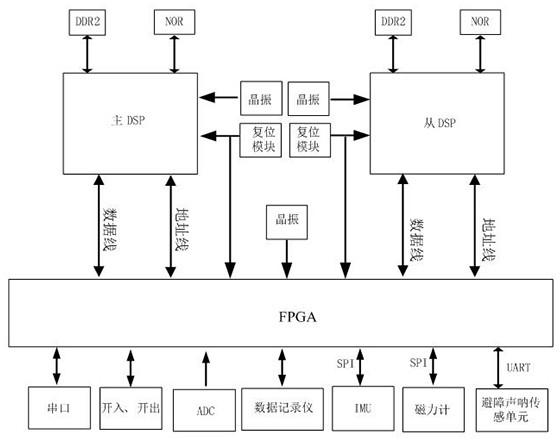
[0058] the first processor;
[0059] The obstacle avoidance sonar sensing unit is used to detect underwater landforms and scan underwater objects for collision avoidance when the underwater robot conducts autonomous navigation;
[0060] A magnetometer to obtain magnetic field strength and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More