

Mobile robot location adjusting method and device
A technology of mobile robot and adjustment method, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as small scanning range, and achieve the effect of solving small scanning range, overcoming the influence of external environment, and large scanning range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
no. 1 example
[0063] The above is the first embodiment of the method for adjusting the position of the mobile robot provided by the embodiment of the present application, and the following is the second embodiment of the method for adjusting the position of the mobile robot provided by the embodiment of the present application.
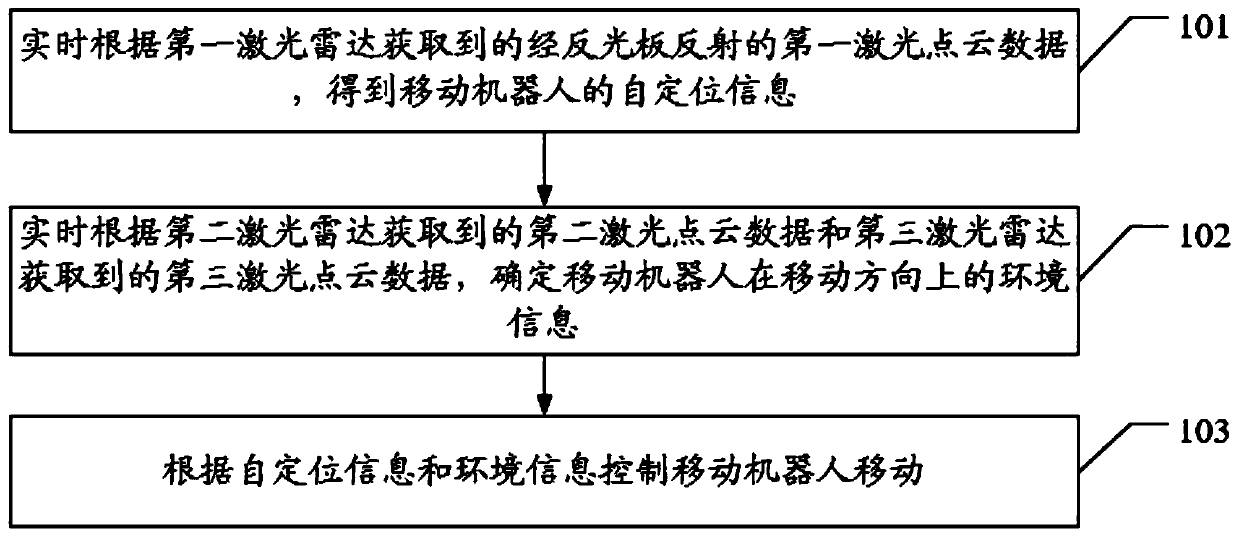
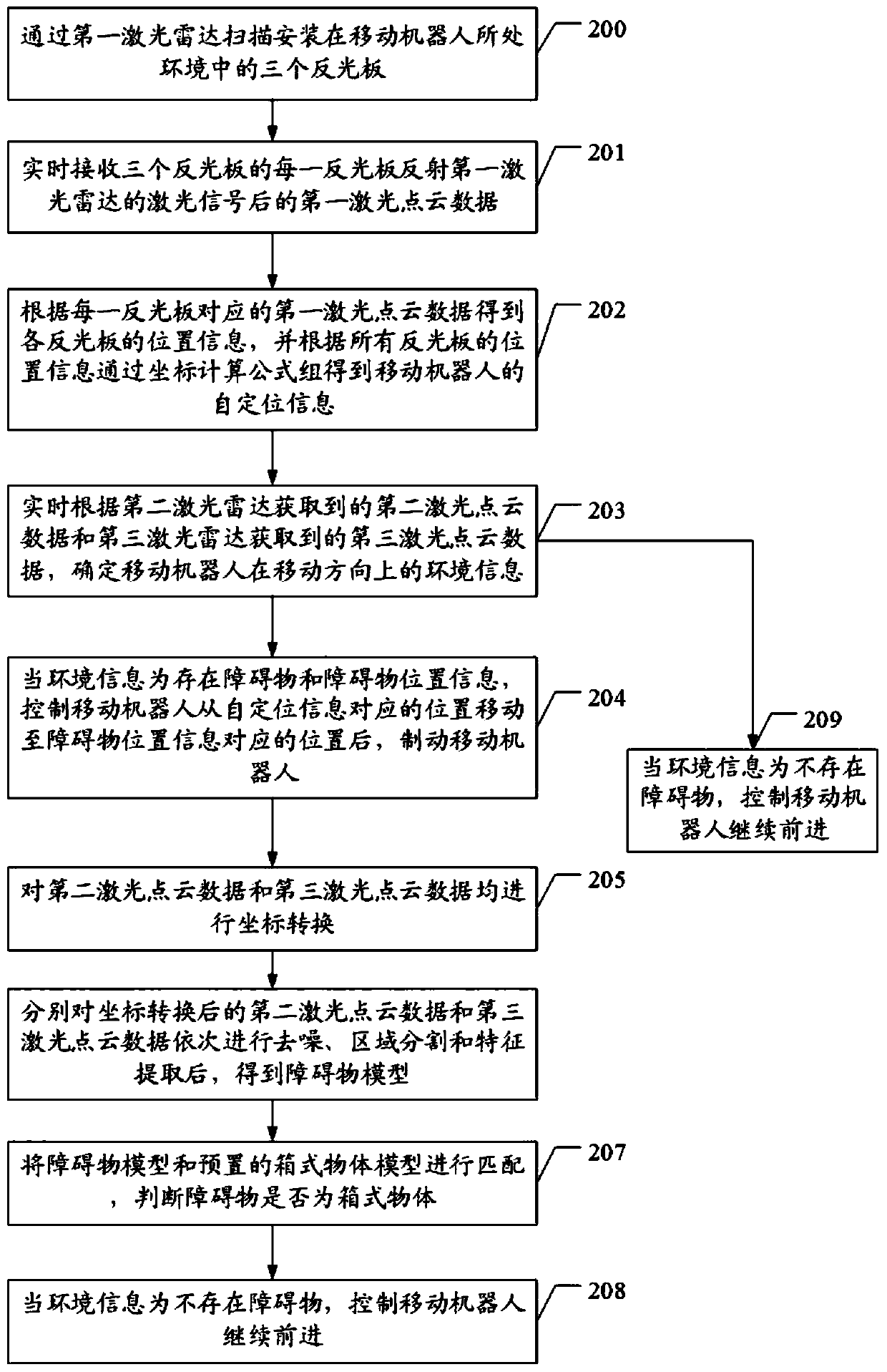
[0064] see figure 2 , a schematic flowchart of the second embodiment of a method for adjusting the position of the mobile robot itself in the embodiment of the present application, including:
[0065] Step 200, scan the three reflectors installed in the environment where the mobile robot is located by using the first laser radar.
[0066] In this embodiment, firstly, the first laser radar is used to scan the three reflectors installed in the environment of the mobile robot. In order to receive the laser point cloud data reflected by the three reflectors, such as Figure 4 As shown, the first lidar S 1 It can be installed on the top or other positions of the geo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More