

Intelligent multifunctional two-finger bionic dexterous hand
A multifunctional and living technology, applied in the field of bionic manipulators, achieves the effect of enhancing dexterity and improving the ability of tasks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The implementation of the present invention will be described in detail below in conjunction with the drawings and examples.
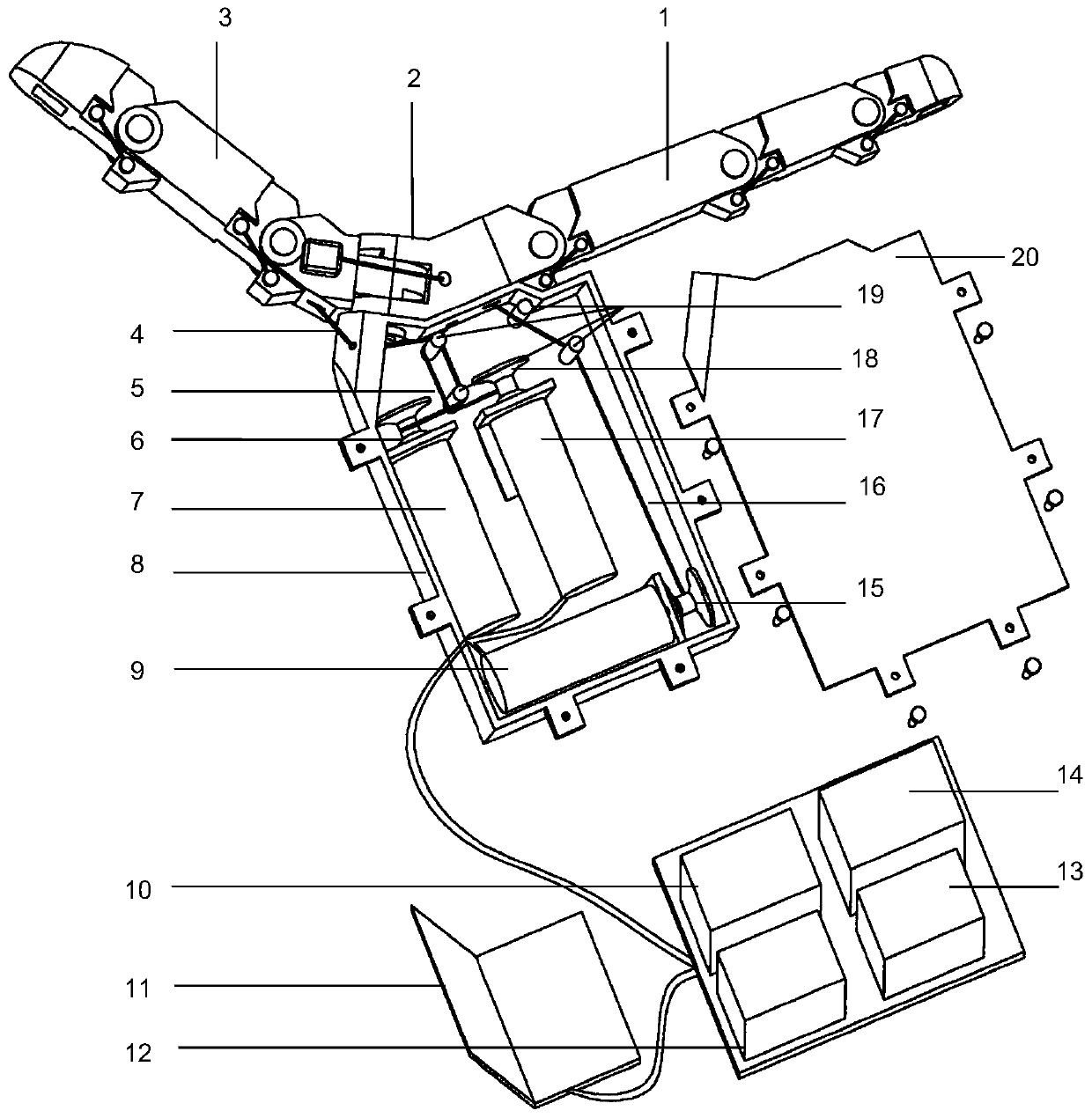
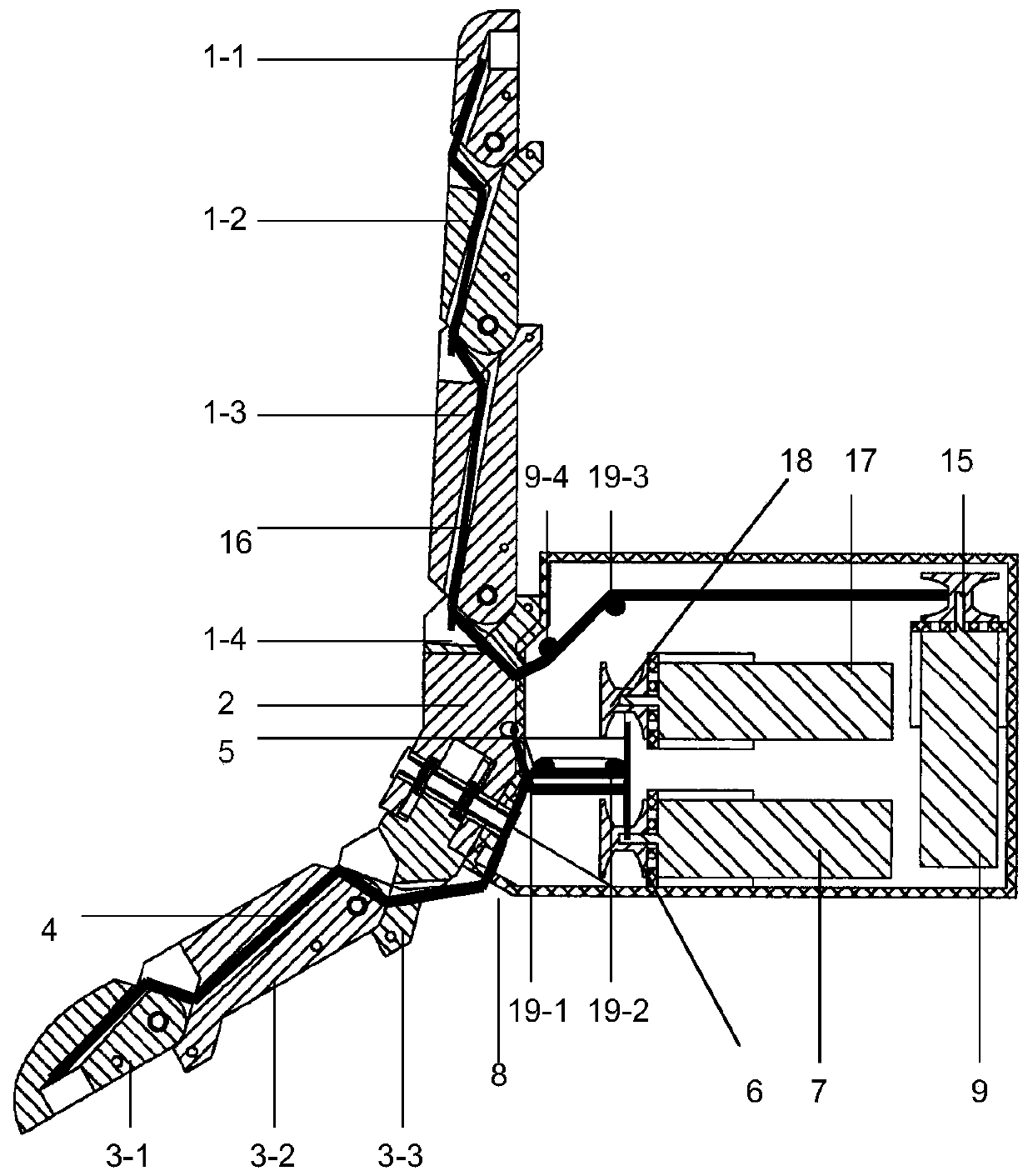
[0027] Such as figure 1 with figure 2 As shown, an intelligent multifunctional two-finger bionic dexterous hand of the present invention is mainly composed of a mechanical system, a power supply system and a control system.
[0028] The mechanical system mainly includes index finger 1, connector 2, thumb 3, traction rope one 4, traction rope two 5, traction rope three 16, box body 8, winding post 19, reel one 6, reel two 18 , reel three 15 and upper cover 20; power supply system mainly includes battery 10, voltage stabilizing and voltage transformation module 14; control system mainly includes computer 11, controller 12, driver 13, micro DC motor 1 7, micro DC motor 2 17. Micro DC motor three 9.
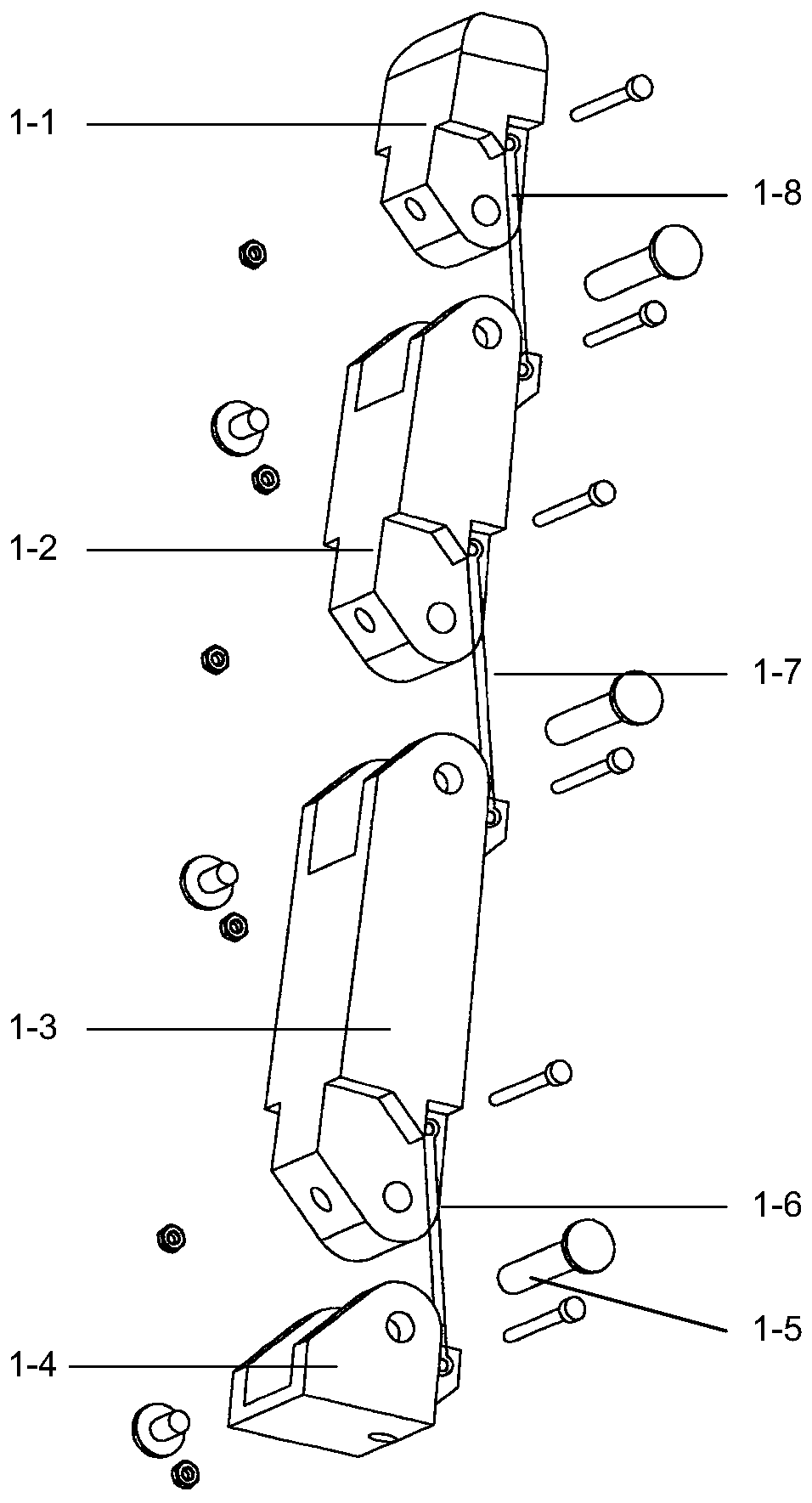
[0029] The explosion diagram of index finger 1 is as follows image 3 As shown, it mainly includes index finger distal segment 1-1, index finger ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More