

Ground crawler-type unmanned vehicle control method based on arm myoelectric signal
A technology of myoelectric signal and control method, which is applied in the field of ground crawler unmanned vehicle control based on arm myoelectric signal, can solve the problems of being susceptible to external environment interference, equipment complexity, lack of flexibility, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0191] The specific implementation process is as follows:
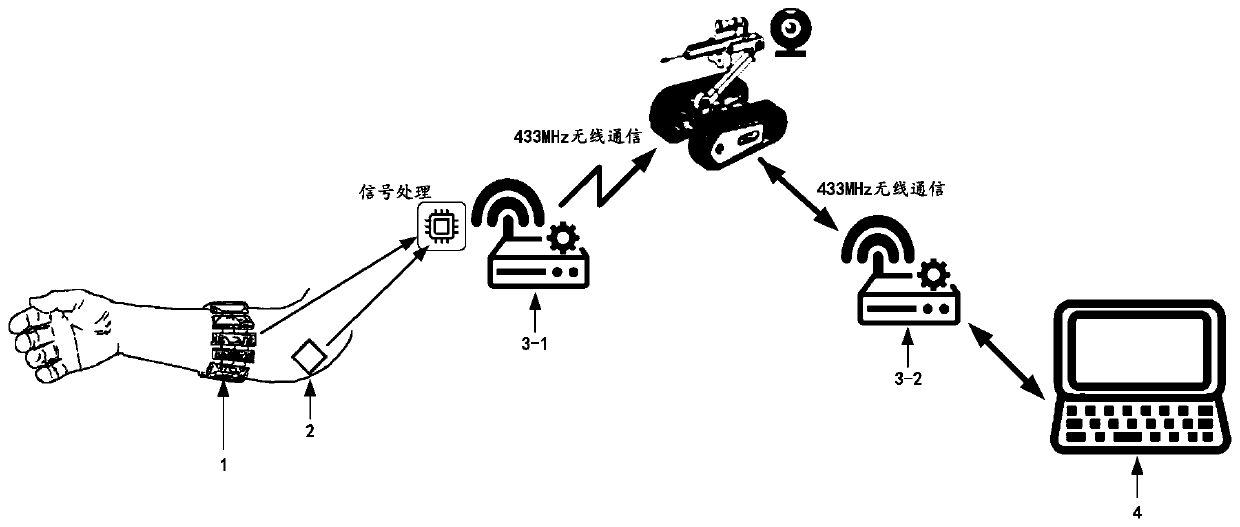
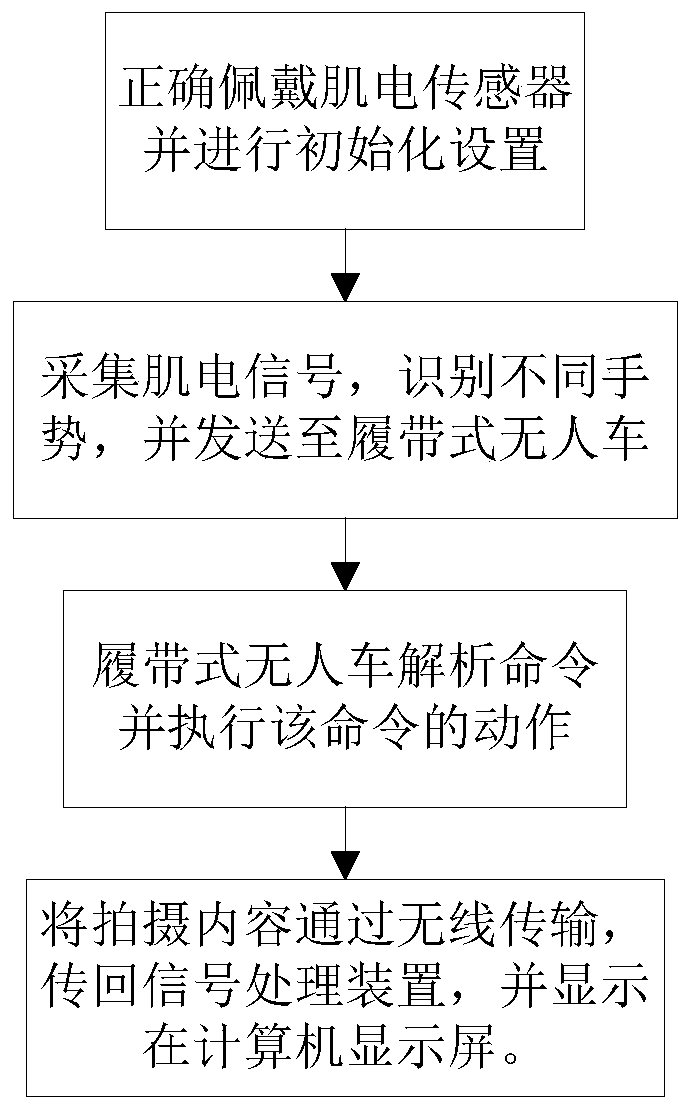
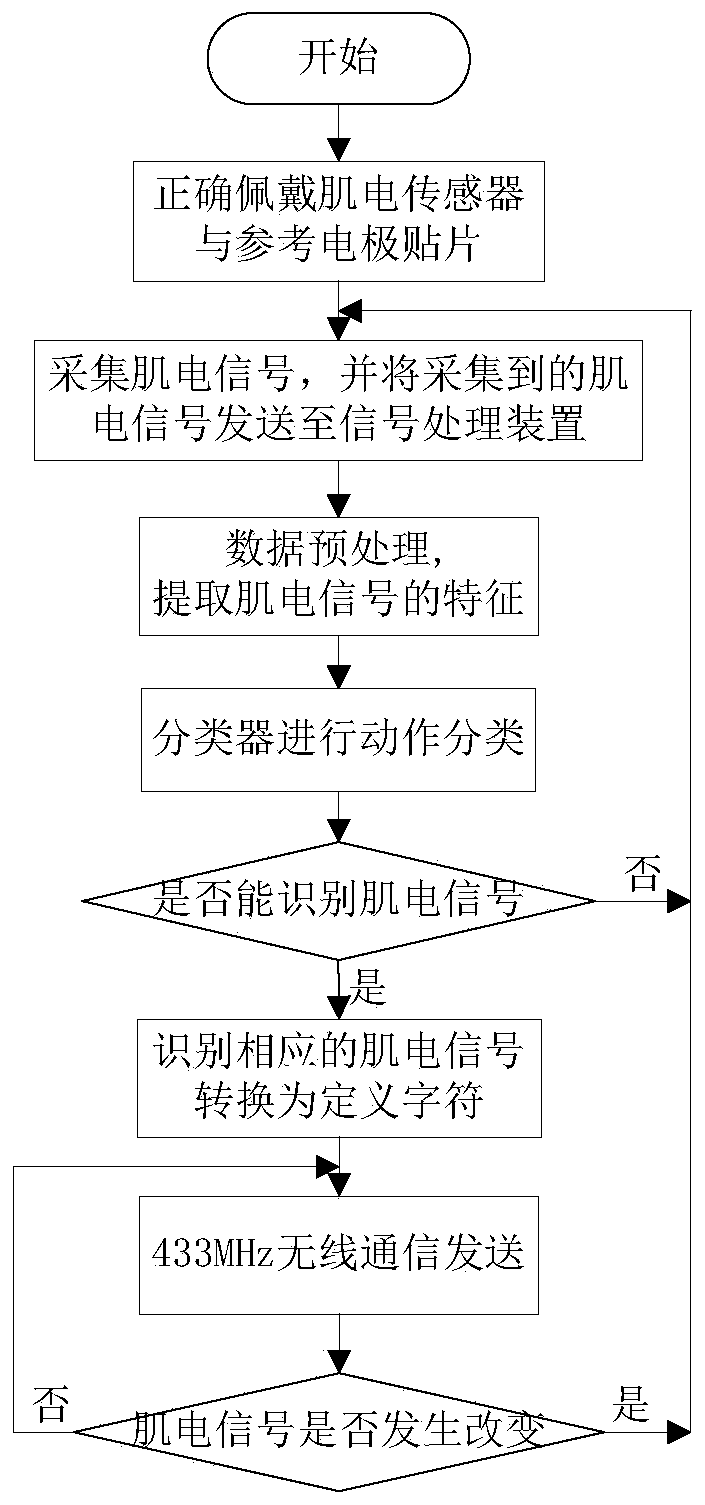
[0192] Firstly, the user wears the myoelectric sensor 1 and the reference electrode 2 correctly, and turns on two first signal processing devices 3-1 and second signal processing devices 3-2 with the same structure. If you want to issue an instruction to move forward, the user needs to make a fist gesture. At this time, the myoelectric sensor 1 and the reference electrode 2 will collect the user's personal myoelectric signal, and the first signal processing device 3-1 will process the collected myoelectric signal. Denoising processing, extracting five types of eigenvalues of the EMG signal, which are the mean absolute value (MAV), standard deviation (SD), root mean square (RMS) in the time domain, mean power frequency (MPF) in the frequency domain, and Median frequency (MF), and then classify the classifier model established by offline data according to the five types of eigenvalues. After classification, it is judg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More