

Mobile robot path planning method based on whale optimization algorithm
A mobile robot and optimization algorithm technology, applied in two-dimensional position/channel control, etc., to achieve the effect of easy movement, strong global search ability, and avoiding local optimum
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0040] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings in the embodiments of the present invention.
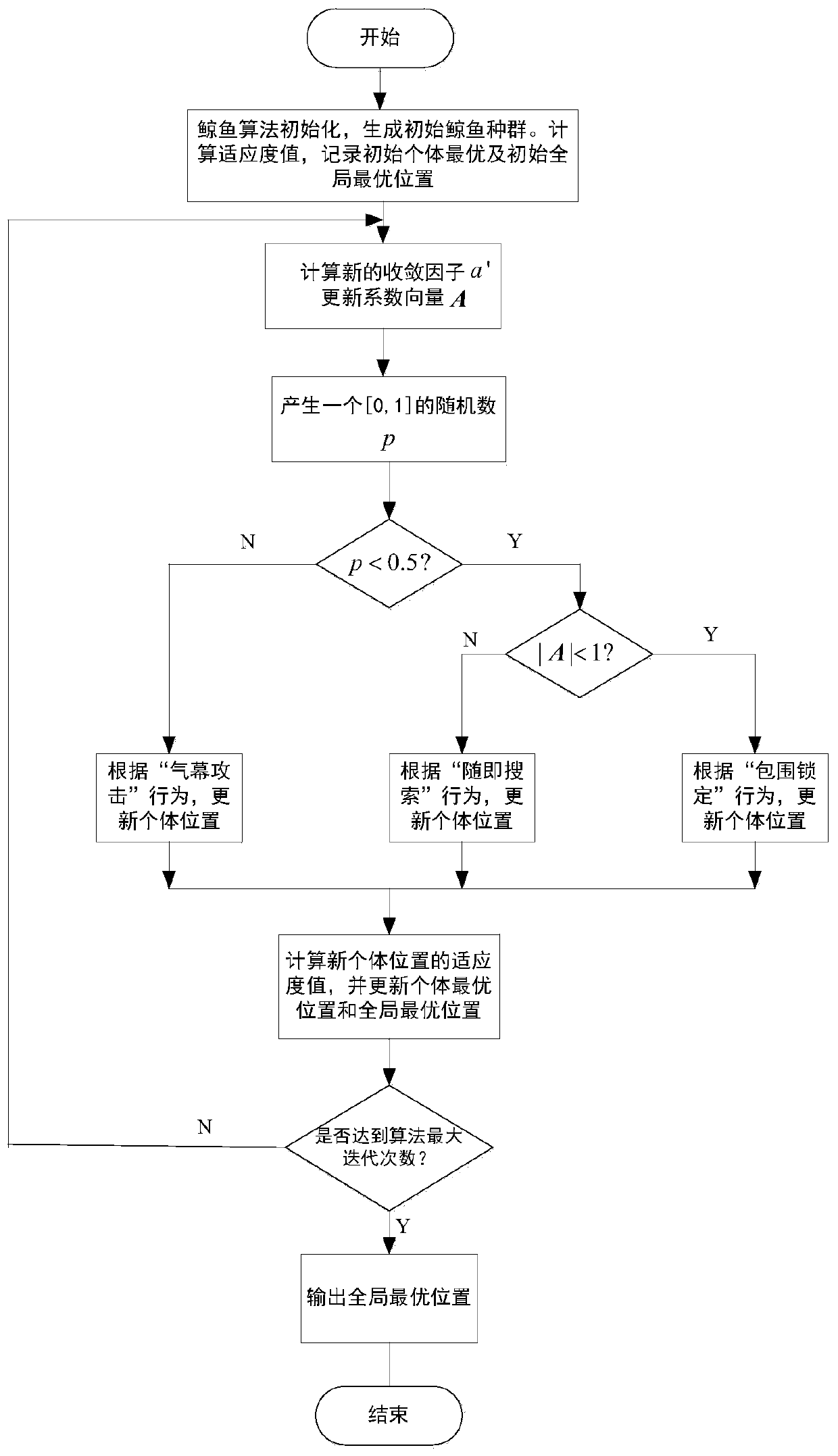
[0041] see figure 1 , the invention provides a mobile robot path planning method based on the whale optimization algorithm, comprising the following steps:
[0042] S1, initialize the whale optimization algorithm, set the parameters of the algorithm, set the number of whale populations to N, and set the maximum number of iterations to t max .
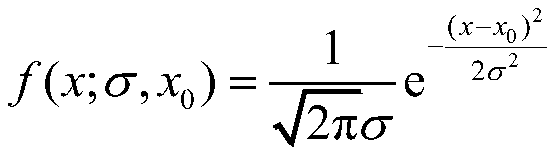
[0043] The selected fitness function is:
[0044]
[0045] Among them, X i is the position of the i-th whale, n represents the dimension of the individual whale in the search space, (x n ,y n ) represents the coordinates of the whale individual in the nth dimension on the grid map. Similarly, (x n+1 ,,y n+1 ) represents the coordinates of the whale individual in dimension n+1 on the grid map. represents the dimensionality of the whale population....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More