

Mobile robot path planning method in dynamic environment
A mobile robot and dynamic environment technology, applied in the field of robotics, can solve problems such as poor smoothness, dynamic obstacle collision, and lack of global optimality, so as to improve safety and reliability and reduce the probability of collision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
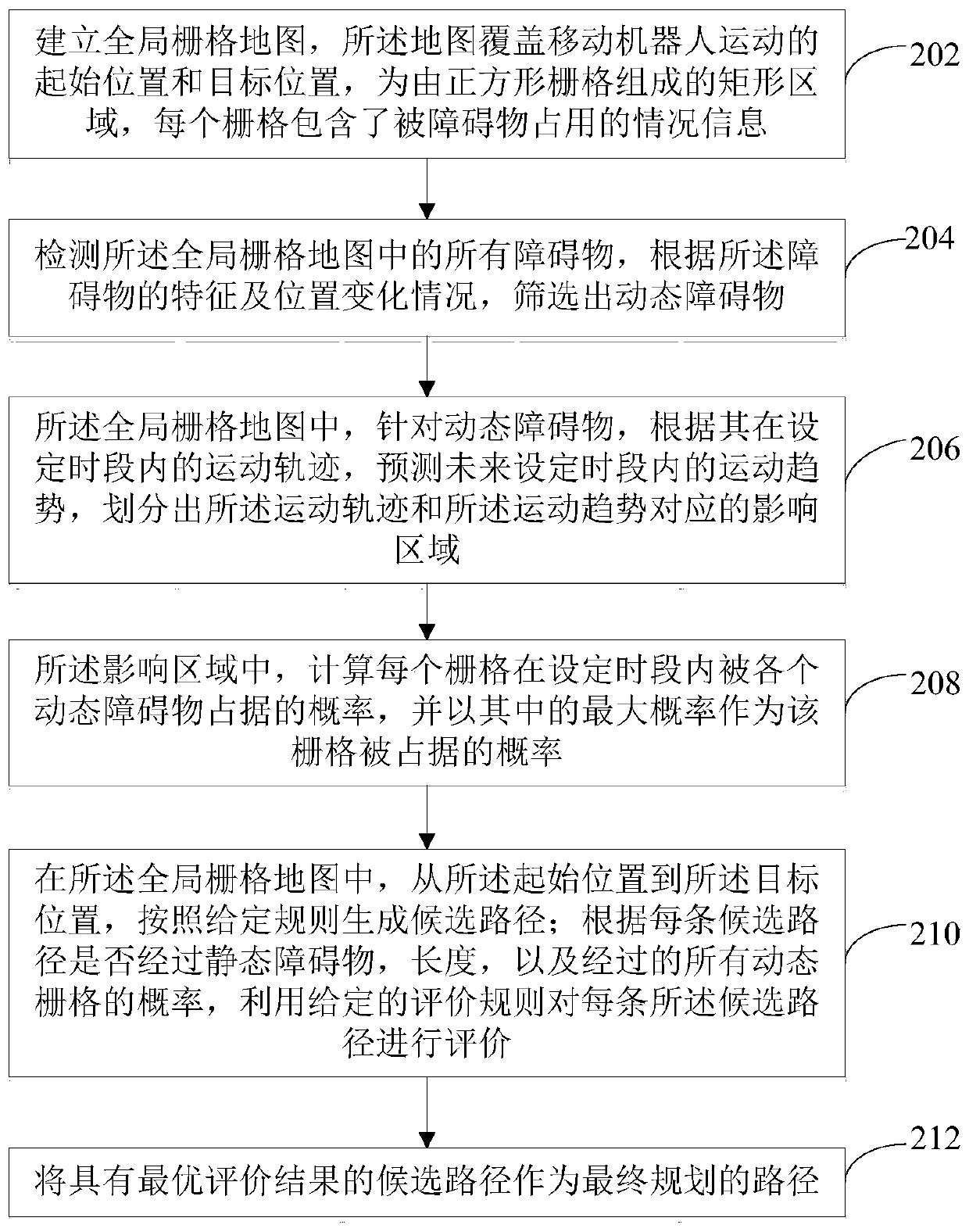
[0028] figure 1 Shows a schematic flowchart of a method for path planning of a mobile robot in a dynamic environment according to an embodiment of the present specification, including steps 202 to 212:
[0029] Step 202: Establish a global grid map, which covers the starting position and target position of the mobile robot movement, and is a rectangular area composed of square grids, and the side length of each grid is c size , Contains information about the situation of being occupied by obstacles.
[0030] Step 204: Detect all obstacles in the global grid map, and filter out dynamic obstacles according to the characteristics and position changes of the obstacles.
[0031] The grids in the global grid map are divided into static grids occupied by static obstacles, dynamic grids occupied by dynamic obstacles, and idle grids not occupied; the marking method of dynamic grids is as follows Narrate
[0032] Detect all obstacles in a given range from the starting position to the target po...
Embodiment 2
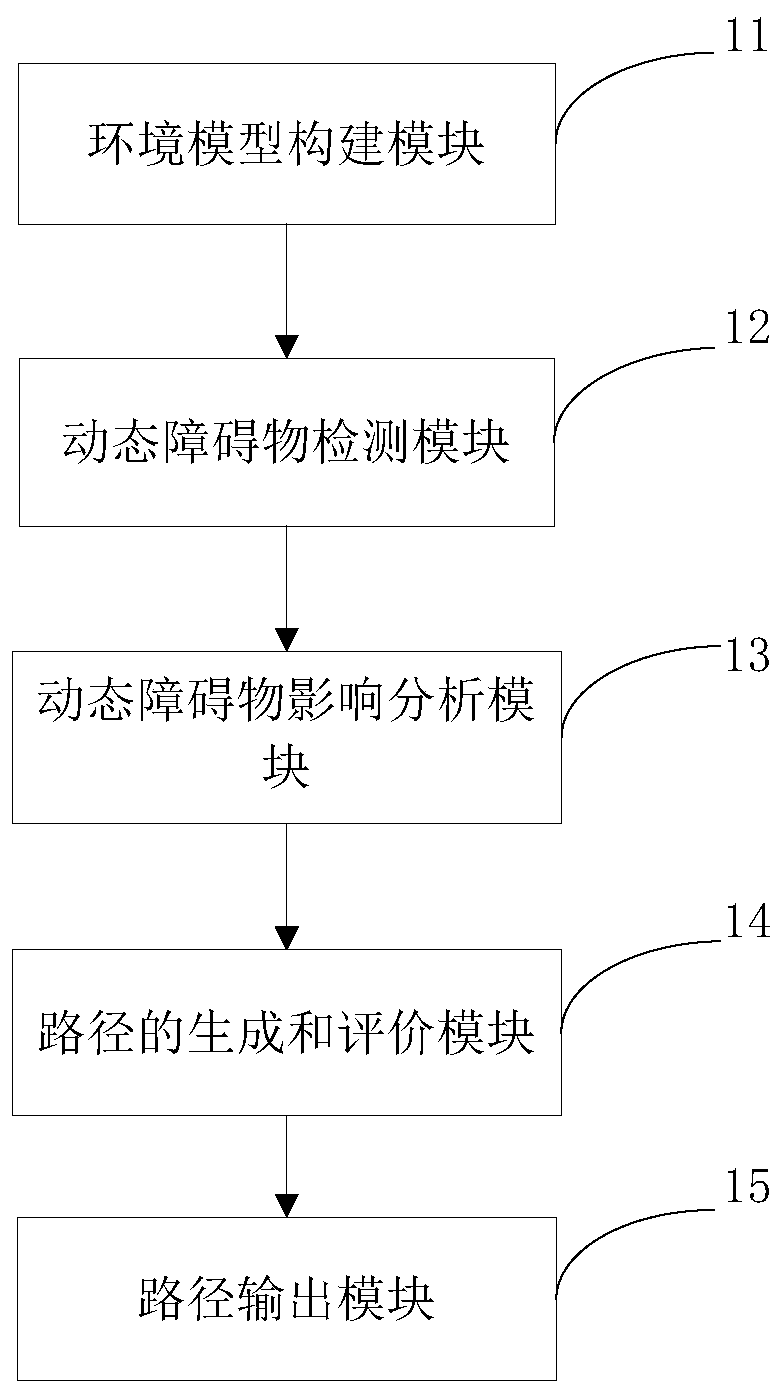
[0056] This manual also provides a dynamic path planning device in a dynamic environment, such as figure 2 Shown, including:
[0057] The environment model construction module 11 is configured to build a global grid map, which can cover the starting position of the mobile robot and the target position of the mobile robot;
[0058] The dynamic obstacle detection module 12 detects all obstacles in the global grid map during the map creation process; at the same time, according to the characteristics and position changes of the obstacles, the dynamic obstacles are screened out, and each The grids corresponding to dynamic obstacles are marked in the global grid map;
[0059] The dynamic obstacle impact analysis module 13 is configured to predict the dynamic obstacle within the set time period of a given time period in the future according to the movement trajectory of the dynamic obstacle in the set time period of a given time period in the global grid map The movement trend of the tra...
Embodiment 3
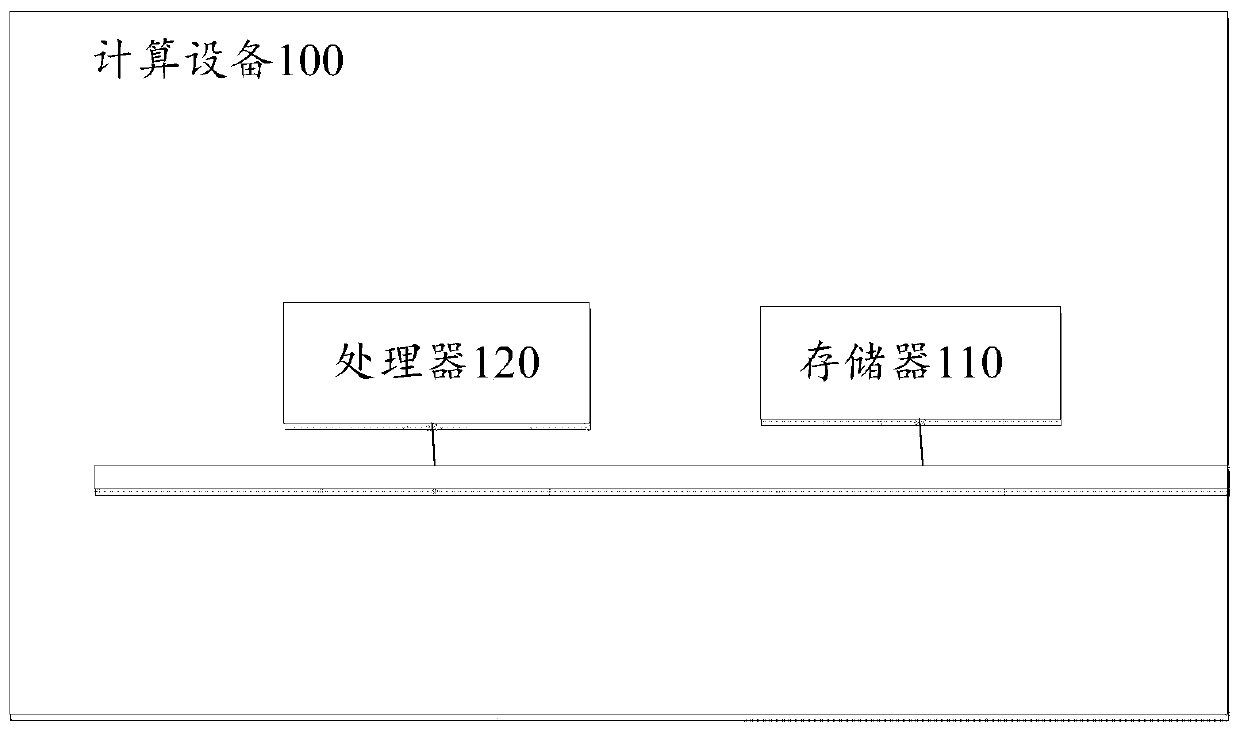
[0063] image 3 A structural block diagram of a computing device 110 for realizing path planning of a mobile robot in a dynamic environment according to an embodiment of the present specification is shown. The components of the computing device 110 include but are not limited to a memory 110, a processor 120, and computer instructions stored on the memory 110 and running on the processor 120. The processor 110 is configured to perform data processing and analysis according to user instructions received by the computing device 110 and computer instructions stored in the memory 110. The memory 110 and the processor 120 are connected by a bus. When the processor executes the instructions, the steps of a method for path planning of a mobile robot in a dynamic environment are realized.
[0064] The computing device 110 may also include a network interface, and the computing device 110 communicates with one or more networks through the network interface. The network interface may inc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More