

Wave glider path tracking control method
A path tracking and control method technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as uncertain control methods and complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
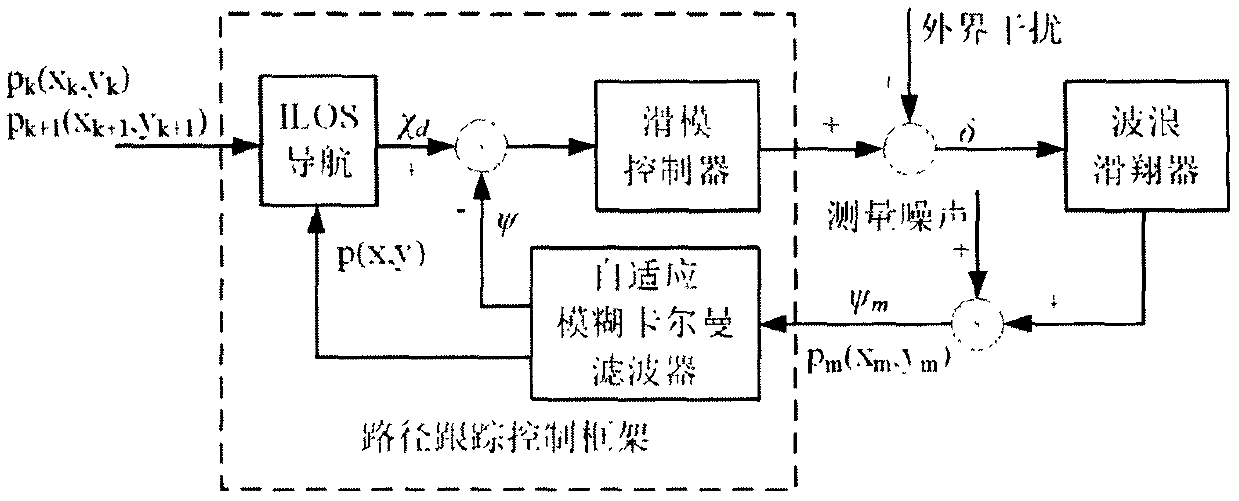
[0015] Such as figure 1 As shown, first give the preset target point p 1 ...p k (i.e. target path), GPS provides real-time location information p m , through the ILOS algorithm, the tracking of the path is converted into the tracking of the desired heading, and the desired heading angle χ d ; Then the desired heading angle χ d The current heading angle ψ is used as the input of the sliding mode controller, and the output rudder angle δ of the controller acts directly on the tail rudder of the wave glider; finally, an adaptive fuzzy Kalman filter is introduced in the feedback loop to weaken the compass and GPS measurement noise and outside interference. By repeating the above steps in turn, the precise tracking of the desired path by the wave glider can be realized.
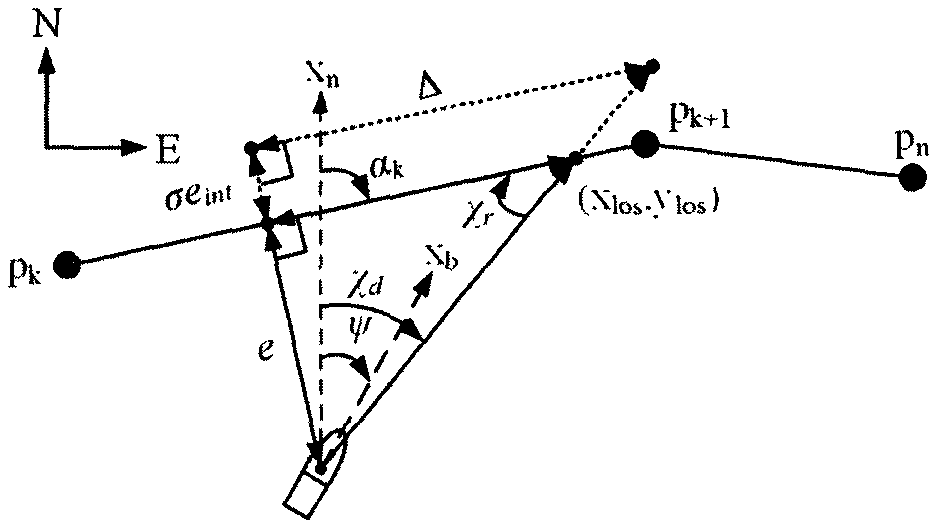
[0016] Such as figure 2 As shown, the desired heading in traditional...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More