

A control method for a bilateral remote control system
An operating system and bilateral technology, applied in the direction of digital control, electrical program control, etc., can solve problems such as few results, and achieve the effect required by good convergence speed and high performance indicators
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0094] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
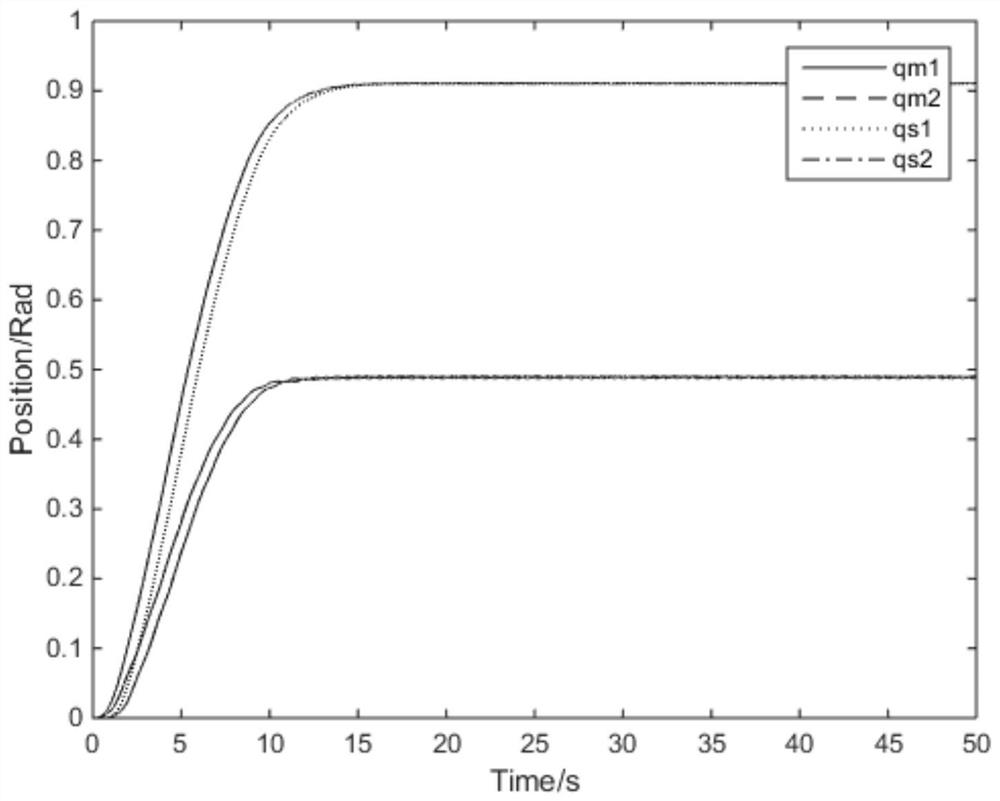
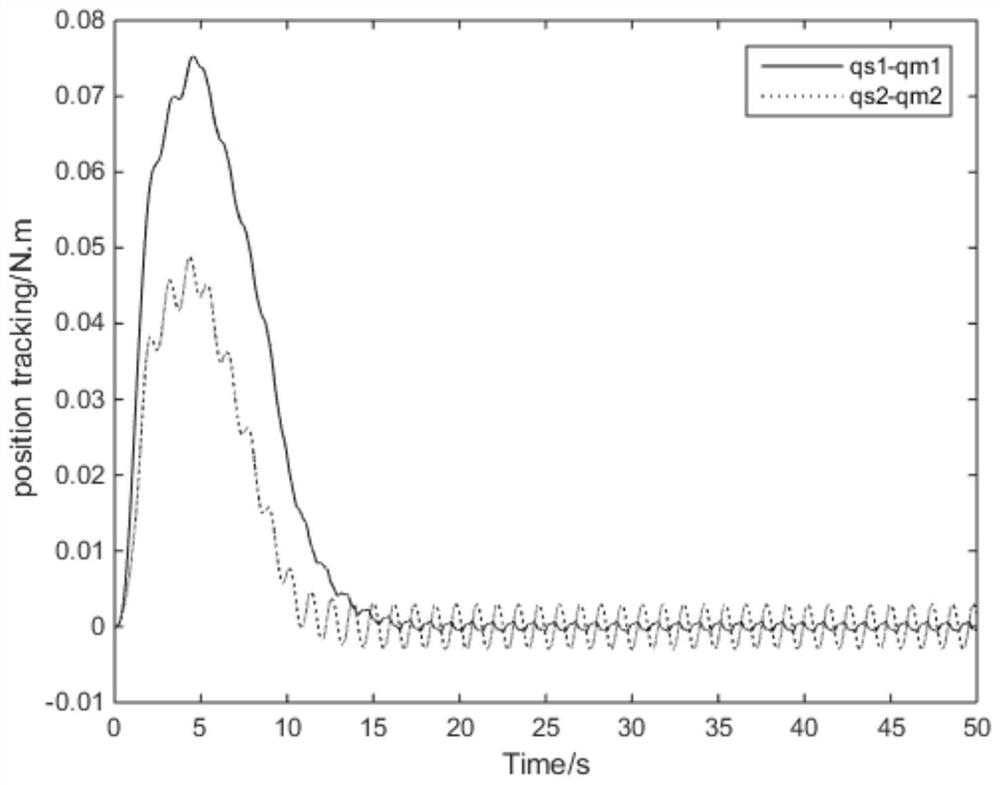
[0095] Such as figure 1 , figure 2 and image 3 As shown, the present invention is a research on the tracking stability of the master and slave ends when the bilateral telecontrol system is subjected to external force under a fixed time control. The specific operation steps are as follows:
[0096] Step 1: Build a system dynamics model:
[0097] master end:
[0098] From the end:
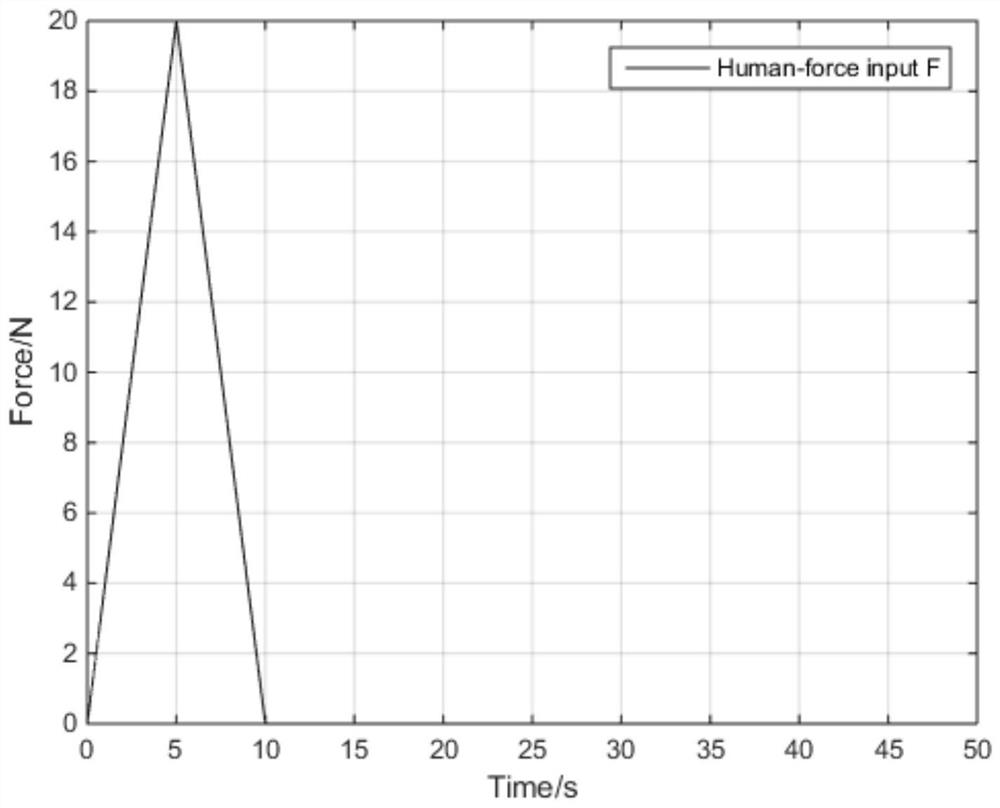
[0099] External environment force model: Human operation torque F h =J m T *[0 1] T *F
[0100] where the inertia matrix M m , M s , the Coriolis force matrix C m and C s and J m and J s The expression of is as follows:
[0101]
[0102]
[0103]
[0104] In the simulation, the parameters are selected as follows:
[0105] m 1 =0.5kg, m 2 = 1 kg, l 1 = 1m, l 2 =0.8m, g=9.81m / s 2 .
[0106] In addition there are The sch...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More