

A feasible road segmentation method based on an improved Unet network model
A network model and road technology, applied in biological neural network models, neural learning methods, image analysis, etc., can solve problems such as gradient disappearance, achieve real-time accurate segmentation, and improve road segmentation accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
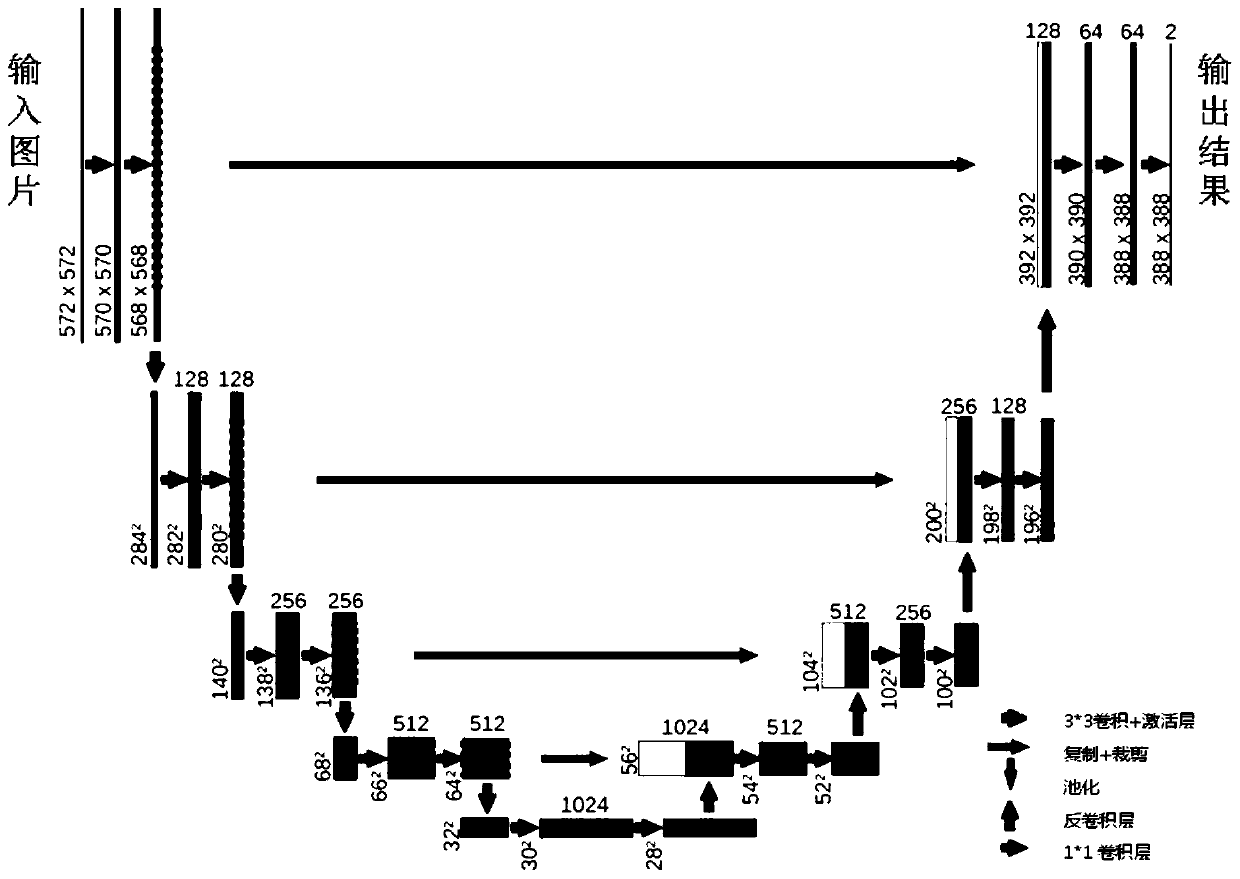
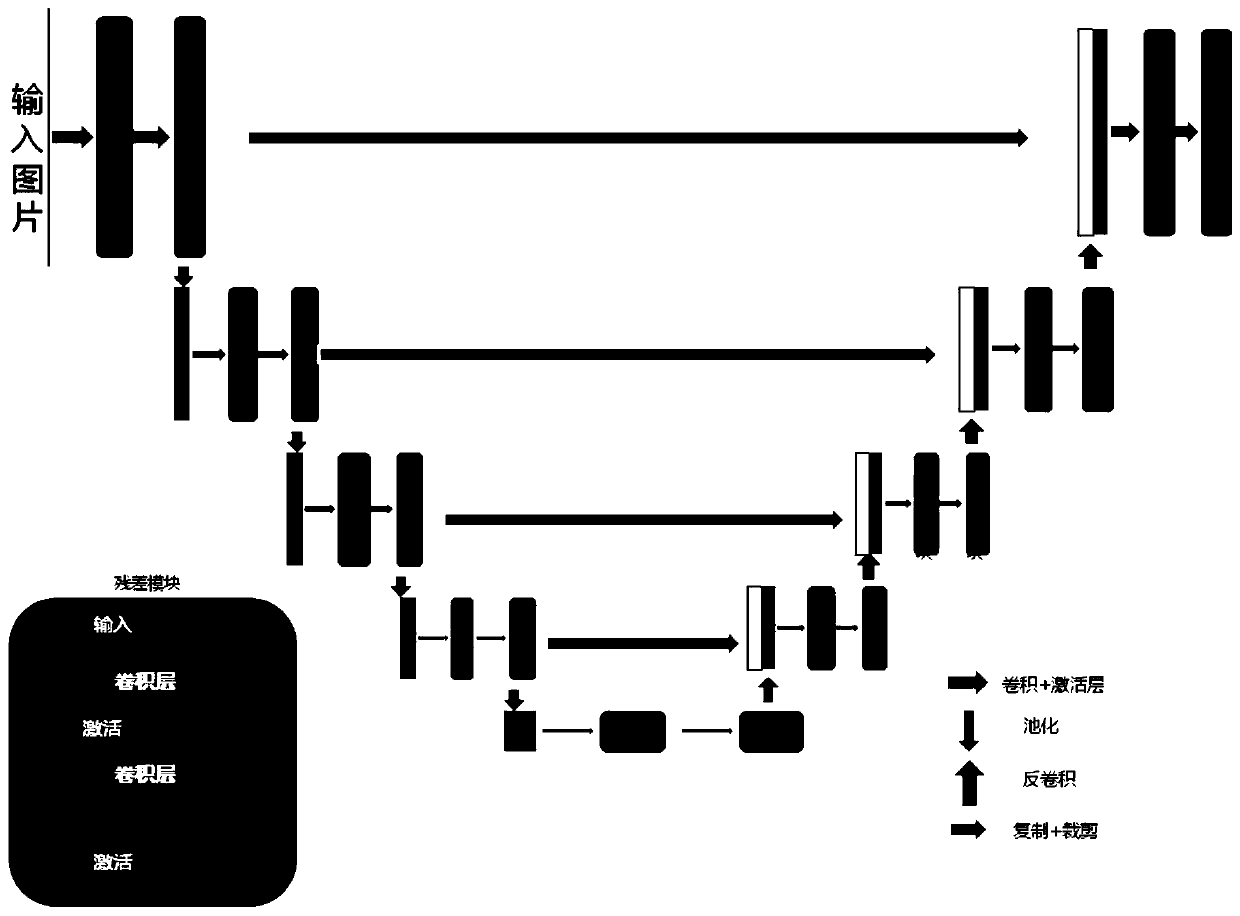
[0035] A feasible road segmentation method based on the improved Unet network model, see figure 1 and figure 2 , the method includes the following steps:
[0036] 101: Modify the convolutional layer in the Unet training model to a ResNet residual module, and use the cross-entropy loss function and the Lovász hinge loss function for backpropagation training;
[0037] 102: Use the trained model to segment the feasible region of the road scene without segmentation labels;
[0038] 103: Scale, contrast, and normalize the training picture and the corresponding segmentation mask label, and enhance the training sample, use the average histogram of the training data as a template, and perform histogram matching on the test data. Test, output the result of road segmentation.
[0039] Further, in step 101, the convolutional layer in the Unet training model is modified to a ResNet residual module, and the cross-entropy loss function and the Lovász hinge loss function are used for bac...
Embodiment 2
[0045] Combine below Figure 1-Figure 4 The scheme in Example 1 is further introduced, see the following description for details:
[0046] Step 1: Training data preprocessing
[0047]The original road image and the corresponding segmentation mask label are converted to a size of 101*101, and the contrast is enhanced. After the color image is grayscaled, the grayscale pixels are converted into 0-1 to reduce the scale of the input feature. Then increase the training sample size through horizontal, vertical, and 90-degree rotation enhancement processing.
[0048] Wherein, the specific operation of this step is well known to those skilled in the art, and will not be repeated in this embodiment of the present invention.
[0049] Step 2: Model Construction
[0050] Build a basic Unet network model (see figure 1 ), where the feature extraction stage and the deconvolution stage are divided into four stages of feature layers according to pooling and the last sample. The feature lay...
Embodiment 3
[0064] Combine below Figure 6-8 The scheme in embodiment 1 and 2 is further introduced, see the following description for details:
[0065] Step 1: Training data preprocessing
[0066] First, the training data is converted to a size of 101*101, and the contrast is enhanced. After the color image is grayscaled, the grayscale pixels are converted to between 0 and 1 to reduce the scale of the input features. Then increase the training sample size through horizontal, vertical, and 90-degree rotation enhancement processing.
[0067] Step 2: Model Construction
[0068] Construct the basic Unet network model, in which the feature extraction stage and the deconvolution stage are divided into 4 stages of feature layers according to pooling and the last sample. The feature layer of each stage contains 3 convolution structures, and the latter two The convolutional structure is replaced by two residual modules, where a normalization layer is added to the output of the second residual ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More