

Stair climbing robot and stair climbing control method thereof
A control method and stair climbing technology, applied in the field of robots, can solve the problems of slow crawling speed and complicated movements, and achieve the effect of efficient lifting or lowering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] In order to make the object, technical solution and advantages of the present invention more clear and definite, the present invention will be further described in detail below with reference to the accompanying drawings and examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
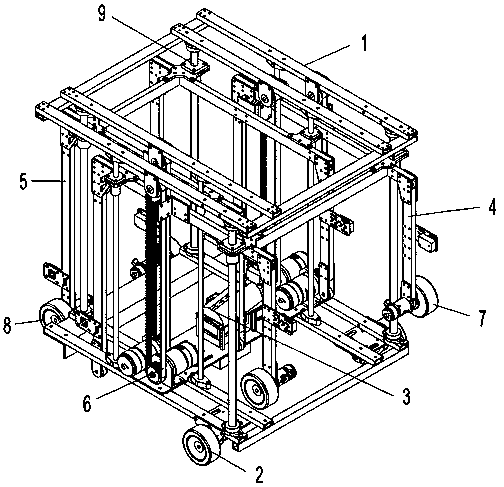
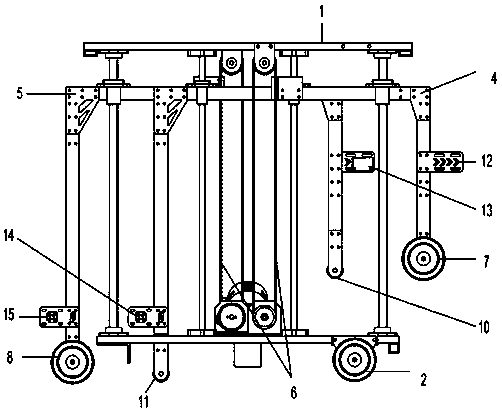
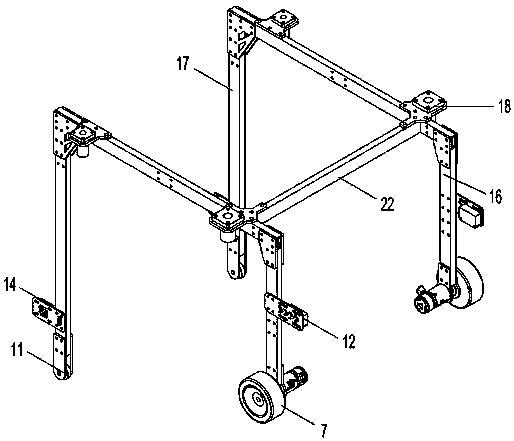
[0052] The first embodiment provided by the present invention is a stair-climbing robot, such as figure 1 As mentioned above, it includes: a body, a control mechanism, and two sets of supporting mechanisms arranged at the front and rear ends of the body and having a height difference;
[0053]The body includes: a frame 1, an optical axis 24, a chassis driving wheel 2 arranged at the bottom of the frame 1, and a lifting mechanism;
[0054] The supporting mechanisms of the two groups all include: supporting brackets, supporting driving wheels, supporting driven wheels and moving connector...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More