

Parking Space Navigation Method Based on A-Star Algorithm
A navigation method and a technology of star algorithm, which are applied to navigation calculation tools and indicate the direction of each open space in the parking lot, can solve the problem that parking space navigation cannot quickly and effectively find the shortest path, and achieve effective and accurate results, high navigation calculation complexity, and navigation. The effect of low computational complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
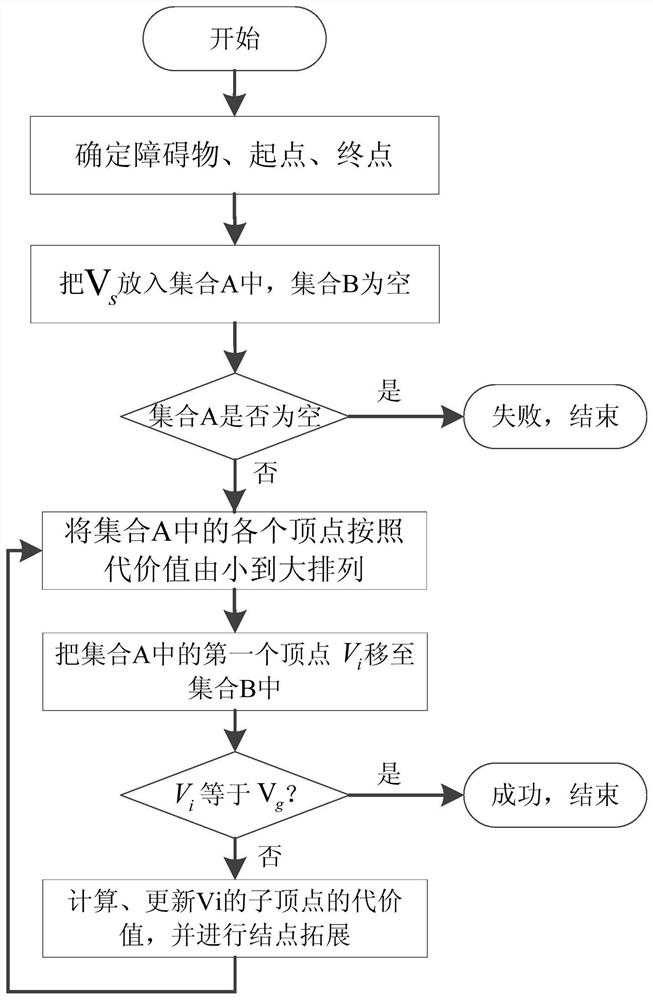
[0027] Specific implementation mode one: combine figure 1 The present embodiment is described, and the parking space navigation method based on the A-star algorithm provided by the present embodiment specifically includes the following steps:
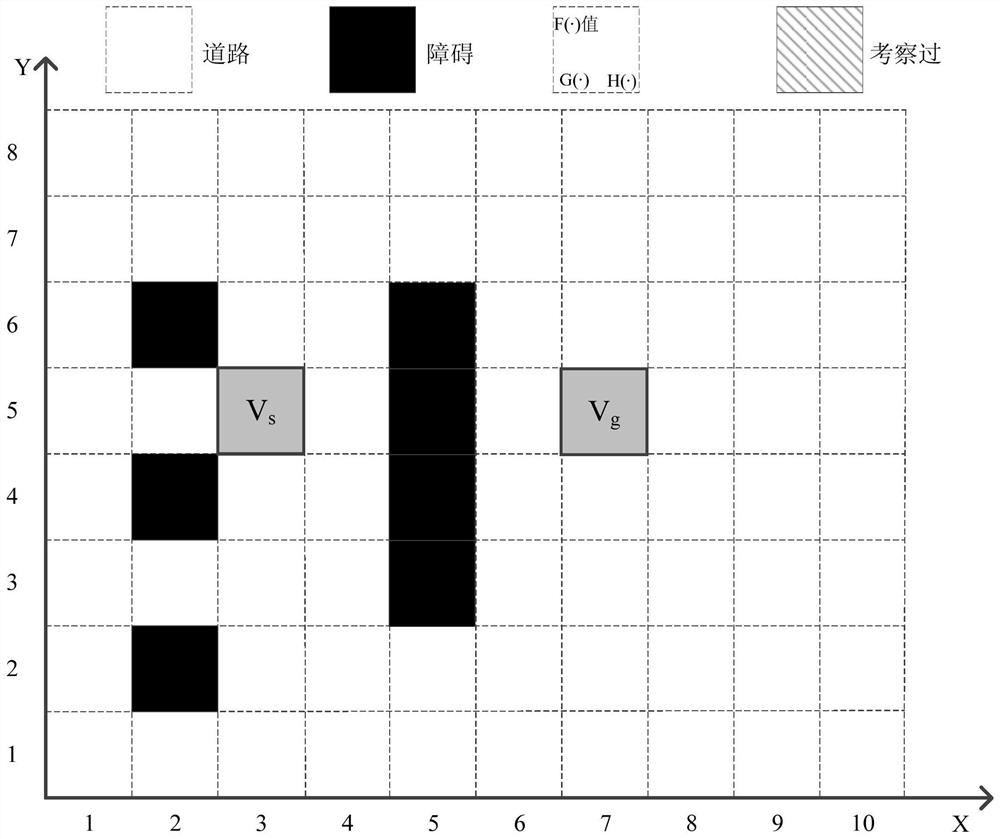
[0028] Step 1. Divide the parking lot into grids, each grid is regarded as a vertex, and the obstacles and starting point V are respectively determined s , end point V g The grid where it is located; the number of vertices except obstacles is n; the starting point V s and terminal V g belong to a particular vertex;
[0029] Step 2. Set the starting point V s Put it into collection A, and leave collection B empty;
[0030] Step 3. Arrange the vertices in the set A according to the cost value from small to large, and arrange the first vertex V i into set B;
[0031] Step 4. Judging the vertex V put into set B in step 3 i Is it the end point V g , if yes, the path search is successful and the navigation ends; if not, expand V i c...
specific Embodiment approach 2
[0037] Specific embodiment two: the difference between this embodiment and specific embodiment one is that the parking space navigation method based on the A-star algorithm also includes the following starting point verification operations:
[0038] After step 2, it is judged whether the set A is an empty set. If the set A is empty, the storage of the starting point fails, the path search fails, and the navigation ends; if the set A is not empty, enter the operation of step 3. This can prevent misoperation or eliminate certain system failures, such as choosing an illegal starting point.
[0039] Other steps and parameters are the same as those in the first embodiment.
specific Embodiment approach 3
[0040] Specific implementation mode three: the difference between this implementation mode and specific implementation mode two is that V described in step four i The child vertex refers to the vertex V with i Adjacent vertices (point V i surrounding vertices), except for the mesh where the obstacle is located. Therefore, each vertex may have 1 to 8 child vertices, such as Figure 4 middle starting point V s There are 6 child vertices.
[0041] Other steps and parameters are the same as those in Embodiment 1 or 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More