Jumping robot based on sma drive
A driving method and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as continuous jumping, inability to land smoothly, and heavy weight of jumping robots, so as to achieve light weight, lower quality, and flexibility Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
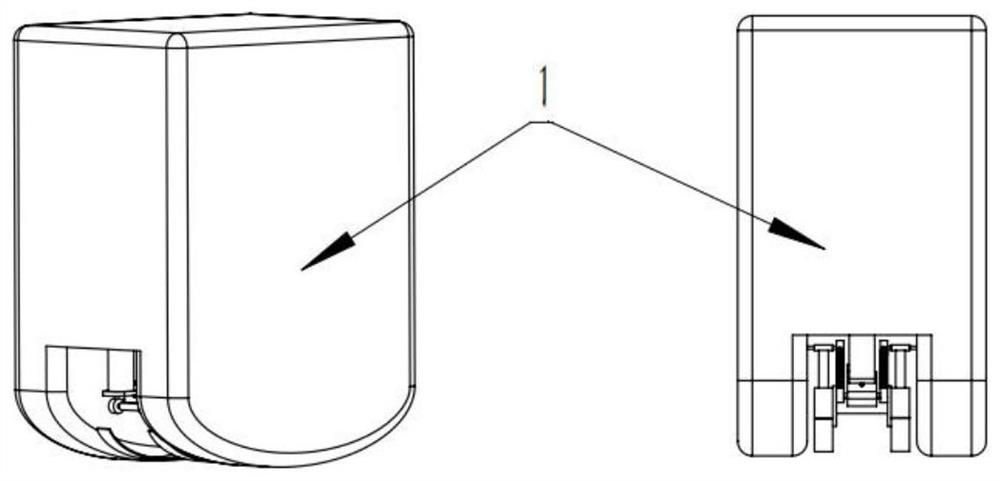
[0022] figure 1 It is a schematic diagram of the overall structure of the present invention, as shown in the figure, the jumping robot based on the SMA driving method of the present embodiment includes a jumping device and an air bag 1 for providing lift for the jumping device; wherein, the air bag 1 can adopt the existing Structure, the lift generated by it is slightly less than the weight of the whole robot, which can ensure that the driving force generated by the legs of the robot during jumping is almost all used for jumping and lifting, instead of being consumed in overcoming gravity to do work;
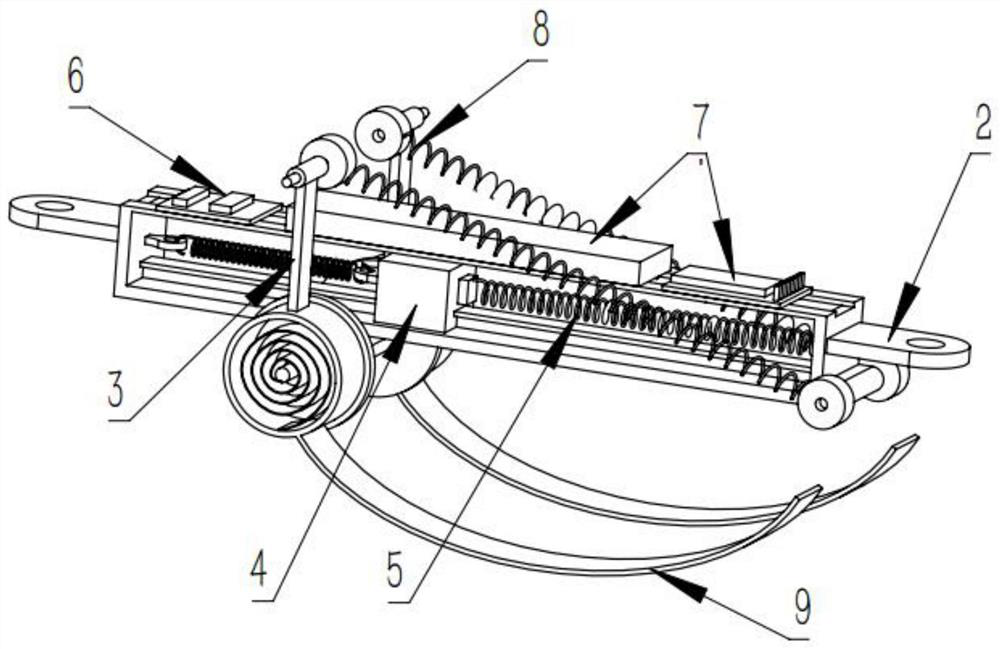
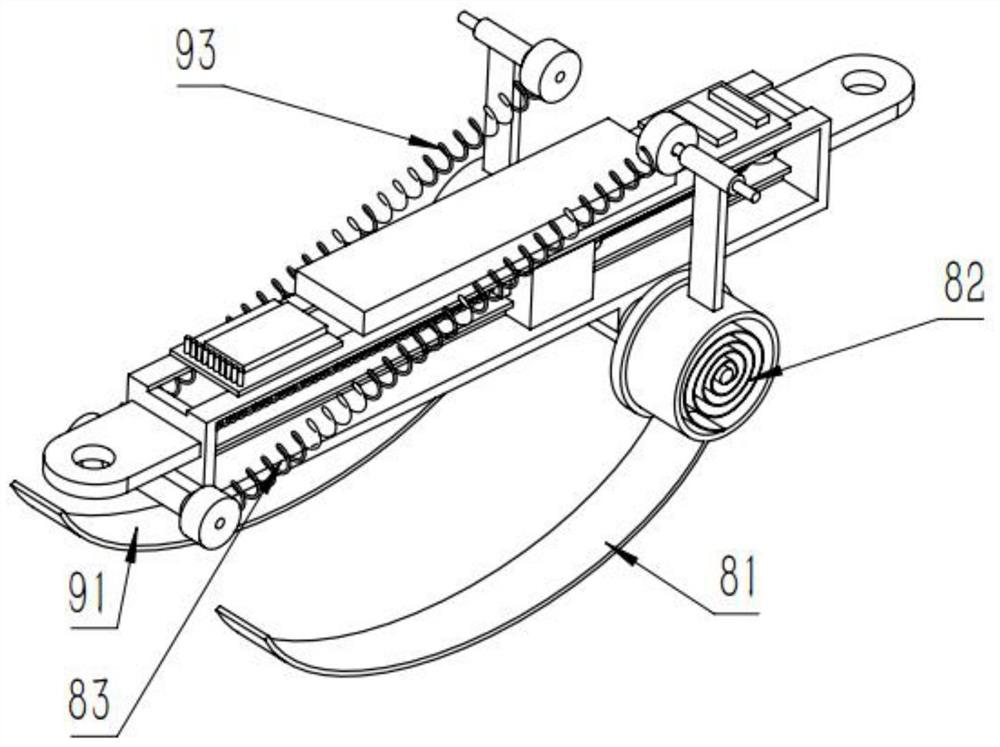
[0023] The jumping device includes a frame 2 and a jumping mechanism arranged on the frame 2, an attitude adjustment mechanism, a control module 6 and a battery module 7; the jumping mechanism includes legs that are rotatably connected to the frame 2 for The legs that drive the legs to swing to complete the jumping action drive the SMA wire, and the reset torsion springs that ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More