Distributed seamless tight integration navigation method and system using LS-SVM-assisted EKF filtering method
An integrated navigation and distributed technology, applied in navigation calculation tools, navigation through speed/acceleration measurement, etc., can solve the unfavorable integrated navigation technology accuracy, poor system fault tolerance, and little consideration of distributed local filter observation loss Lock and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
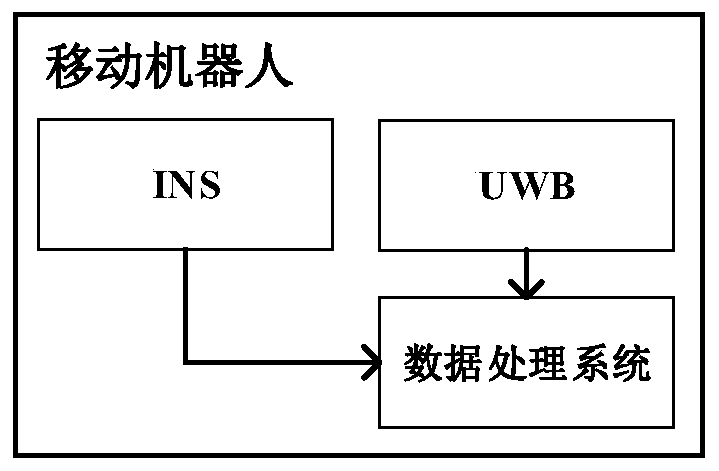
[0048] In one or more embodiments, a distributed seamless tight integrated navigation system using LS-SVM assisted EKF filtering method is disclosed, such as figure 1 As shown, including: INS, data processing unit, and UWB are all fixed on the mobile pedestrian and connected with the data processing unit. UWB is used to detect the distance between the mobile pedestrian and the reference node; INS is used to detect the distance between the mobile pedestrian and the reference node; the data processing unit is used to perform data fusion on the collected sensor data.
[0049] Among them, the data processing unit is equipped with an EKF filter, which includes several local filters and a main filter, and the distance between the reference node and the target node measured by the ultra-wideband (UWB) and inertial navigation (INS) respectively The difference of the square is used as the observation quantity of the local filter, and the local prediction of the target node is obtained ...
Embodiment 2
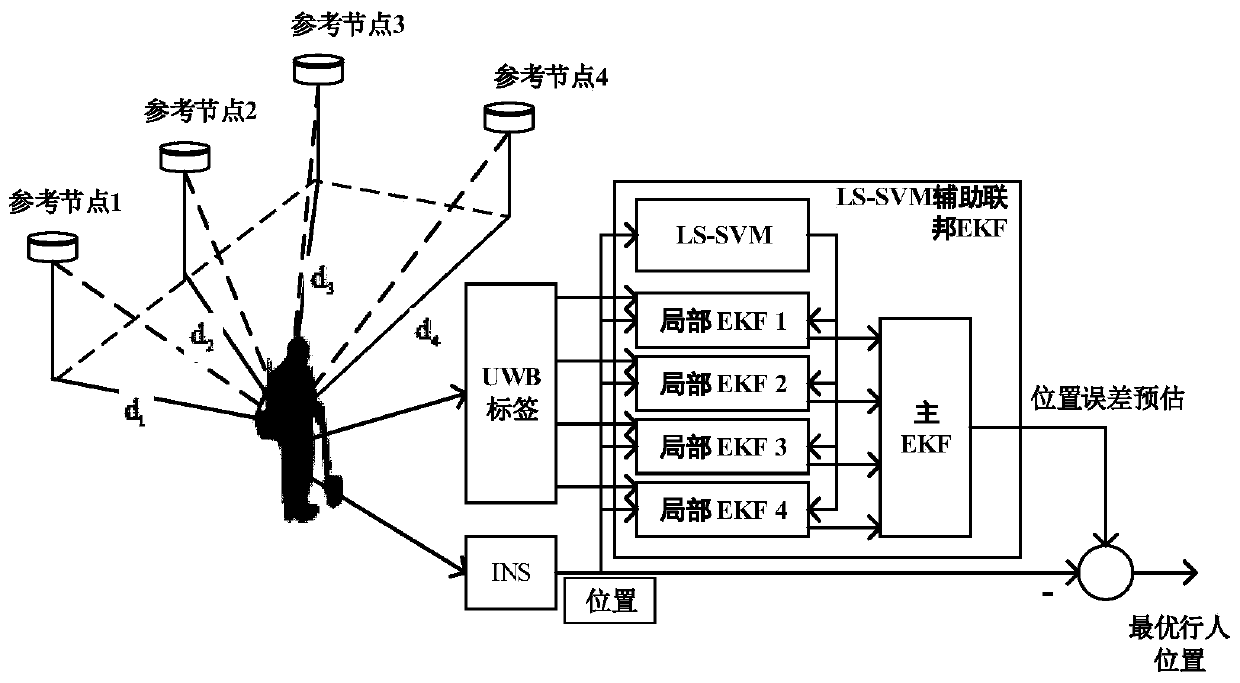
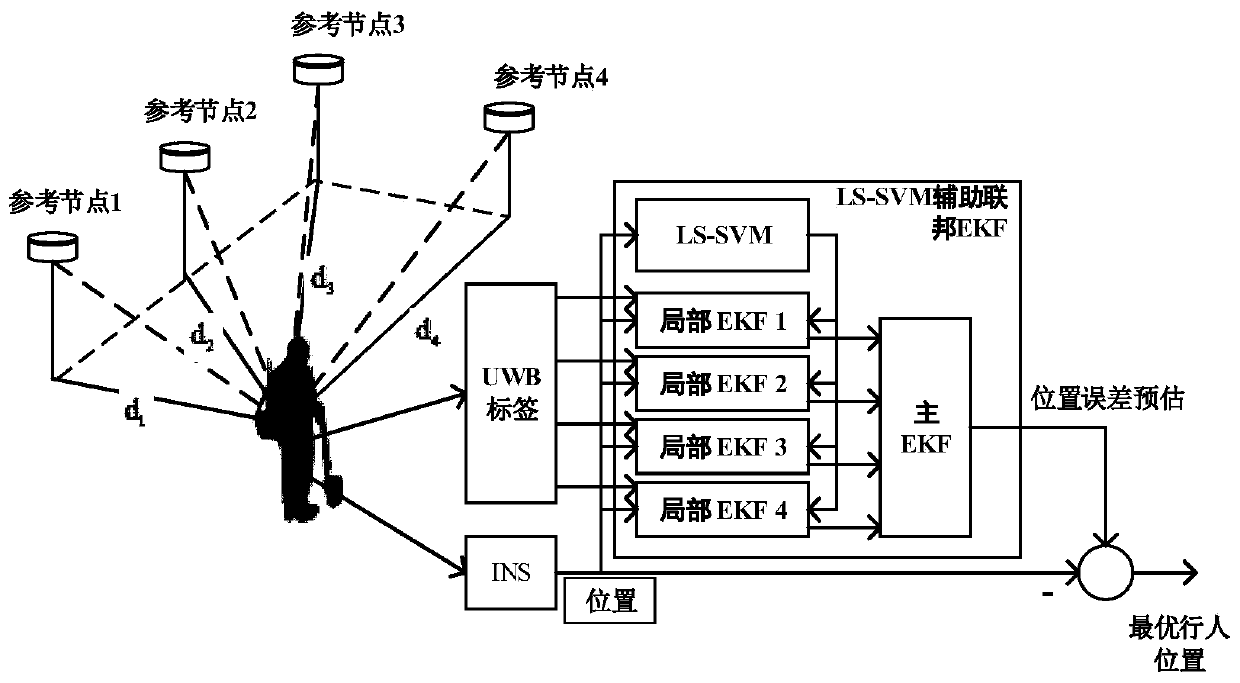
[0051] A distributed seamless tight combination navigation method using LS-SVM assisted EKF filtering method disclosed in one or more embodiments, such as figure 2 shown, including:
[0052] (1) The algorithm adopts a federated filtering structure, and the difference between the square of the distance between the reference node and the target node measured by the ultra-wideband (UWB) and the inertial navigation system (INS) respectively is used as the observation of the local filter. The local estimation of the target node is obtained, and the main filter performs data fusion on the local estimation, and finally obtains the optimal state estimation of the target node;
[0053] During the operation of the target node, once the observation information of a single reference node is out of lock, the LS-SVM algorithm is first used to construct the mapping relationship between the INS position and its error, and the mapping relationship is used to map the local filter that is out o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More