Ins/uwb integrated navigation algorithm and system based on fusion of kf/fir and ls-svm
A technology of integrated navigation and navigation coordinate system, which is applied in the field of INS/UWB integrated navigation algorithm and system, and can solve problems such as not working properly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention is described in detail below in conjunction with accompanying drawing:
[0037] It should be noted that the terminology used here is only for describing specific implementations, and is not intended to limit the exemplary implementations according to the present application. In addition, it should also be understood that when the terms "comprising" and / or "comprises" are used in this specification, it indicates the presence of features, steps, operations, means, components and / or their combination.
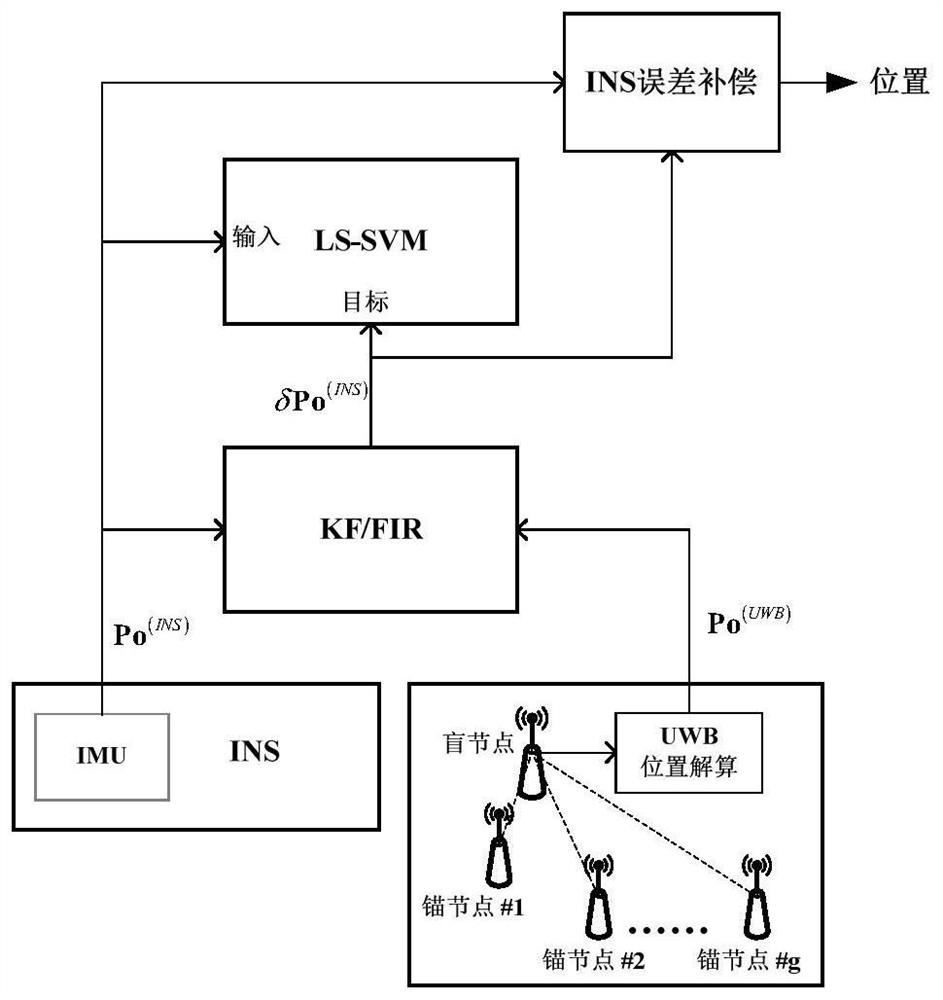
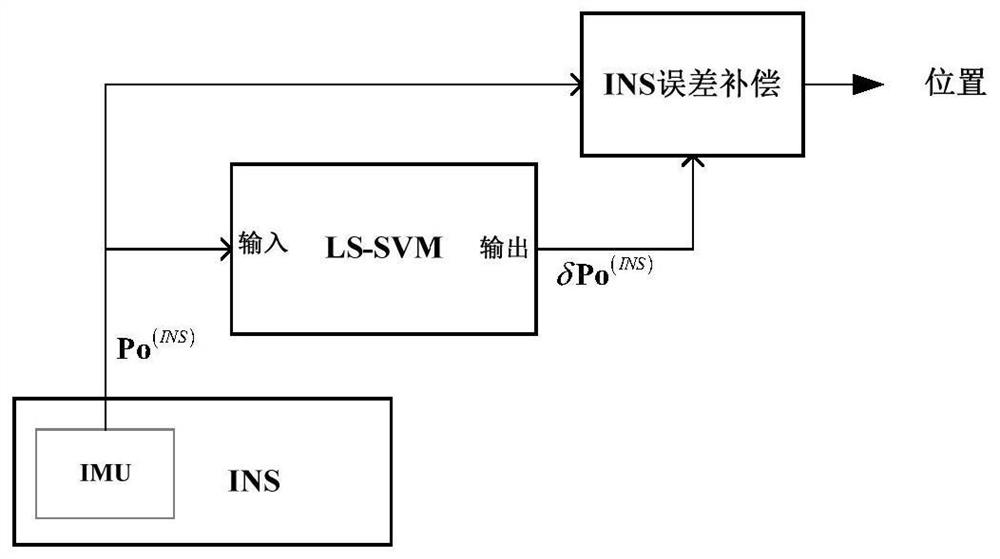
[0038] In order to solve the problems proposed by the background technology, the present invention discloses an INS / UWB integrated navigation algorithm based on KF / FIR and LS-SVM fusion, including:
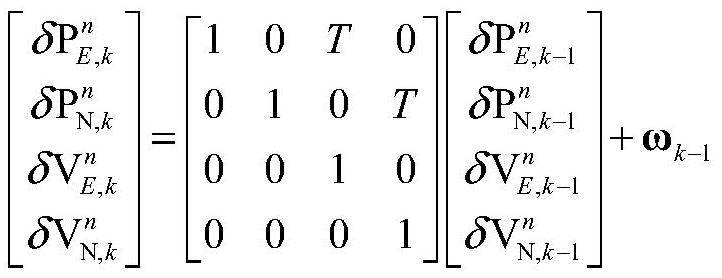
[0039] (1) The eastward and northward position and velocity errors of the inertial navigation system INS are used as the state variables, and the difference between the eastward and northward position of the target pedestrian measured by the inertial navig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More