

Wearable lower limb exoskeleton rehabilitation robot
A rehabilitation robot and exoskeleton technology, applied in the field of robots, can solve the problems of loss of motor use efficiency, reduce stability and reliability, reduce contact area and degree of contact, etc., to improve comfort and flexibility of movement, improve automation degree, the effect of improving the efficiency of use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be described in further detail below in conjunction with the accompanying drawings.
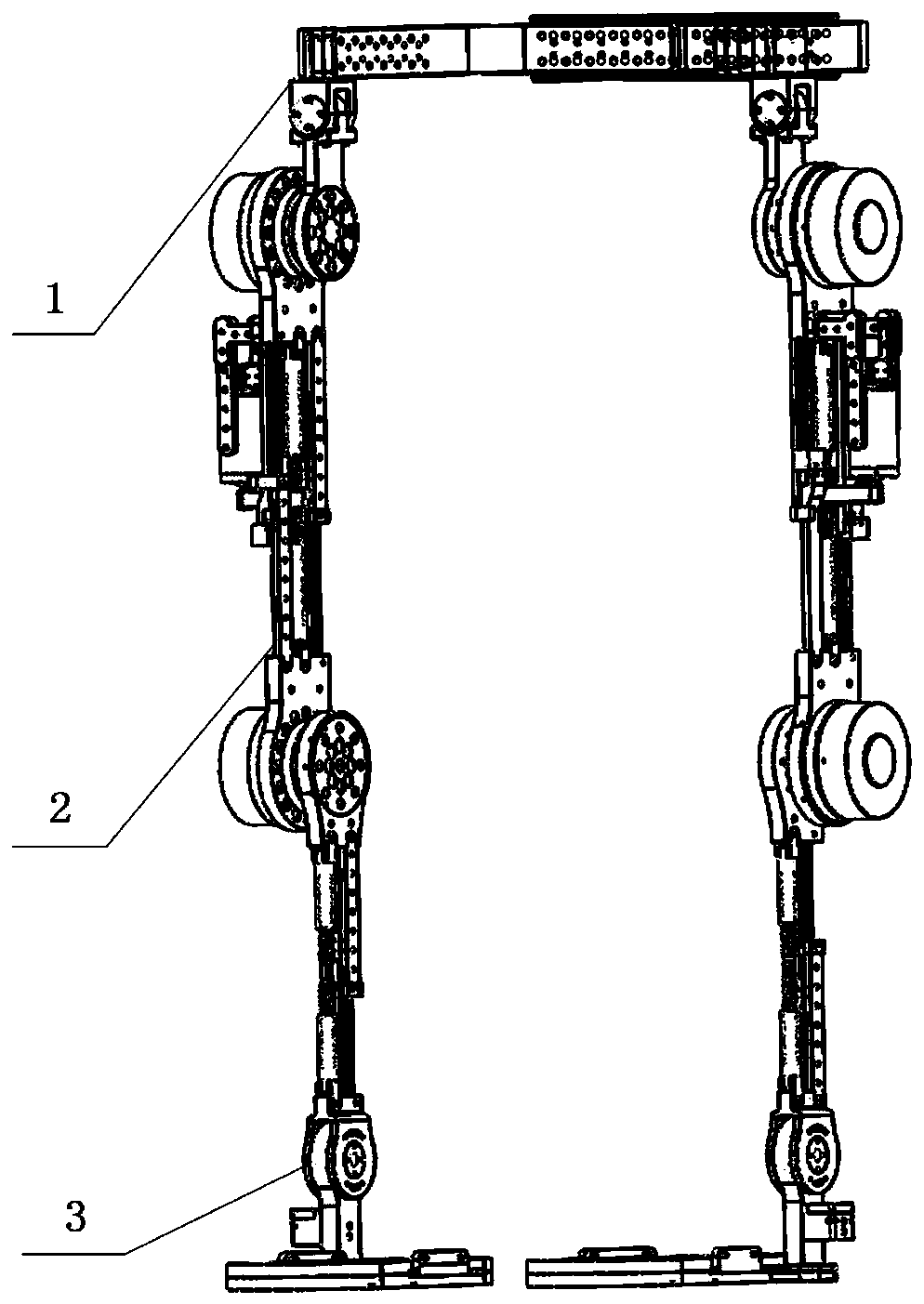
[0045] Wearable lower extremity exoskeleton rehabilitation robot such as figure 1 As shown, it includes a waist-hip joint device 1 , a calf continuous adjustment device 2 , and an ankle joint-foot device 3 . Wherein, the waist-hip joint device 1 is connected with the calf continuous adjustment device 2 , and the calf continuous adjustment device 2 is connected with the ankle joint-foot device 3 .
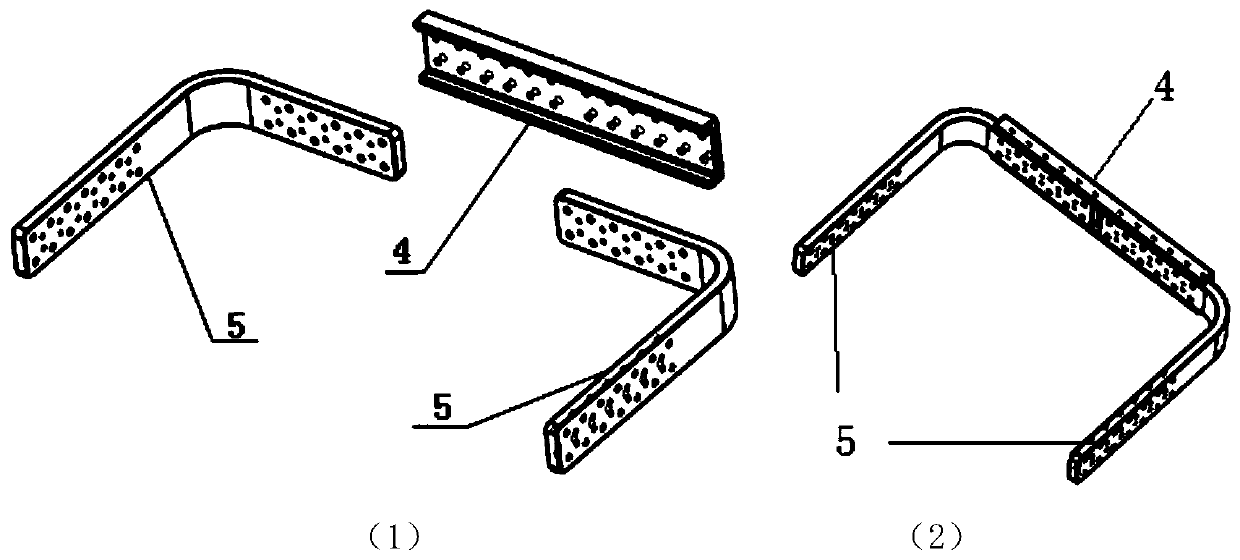
[0046] The waist-hip joint device 1 is divided into two parts: the waist structure and the hip joint structure. The waist structure of the wearable lower limb exoskeleton rehabilitation robot is as follows: figure 2 As shown, the waist structure includes a waist connecting piece 4 and two L-shaped waist bending panels 5 , and the two ends of the waist connecting piece 4 are fixedly connected to the waist bending panels 5 respectively. There are mounting holes ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More