

Dynamic obstacle avoiding method based on collision detection
A dynamic obstacle and collision detection technology, applied in the direction of motor vehicles, measuring devices, mapping and navigation, etc., can solve problems such as failure to avoid dynamic obstacles, and achieve the effect of traffic efficiency and smoothness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] Preferred embodiments of the present invention will be specifically described below in conjunction with the accompanying drawings, wherein the accompanying drawings constitute a part of the application and are used together with the embodiments of the present invention to explain the principle of the present invention.
[0060] The embodiment of the invention discloses a dynamic obstacle avoidance method based on collision detection, which can be used for motion planning of an unmanned vehicle to avoid dynamic obstacles in real time.
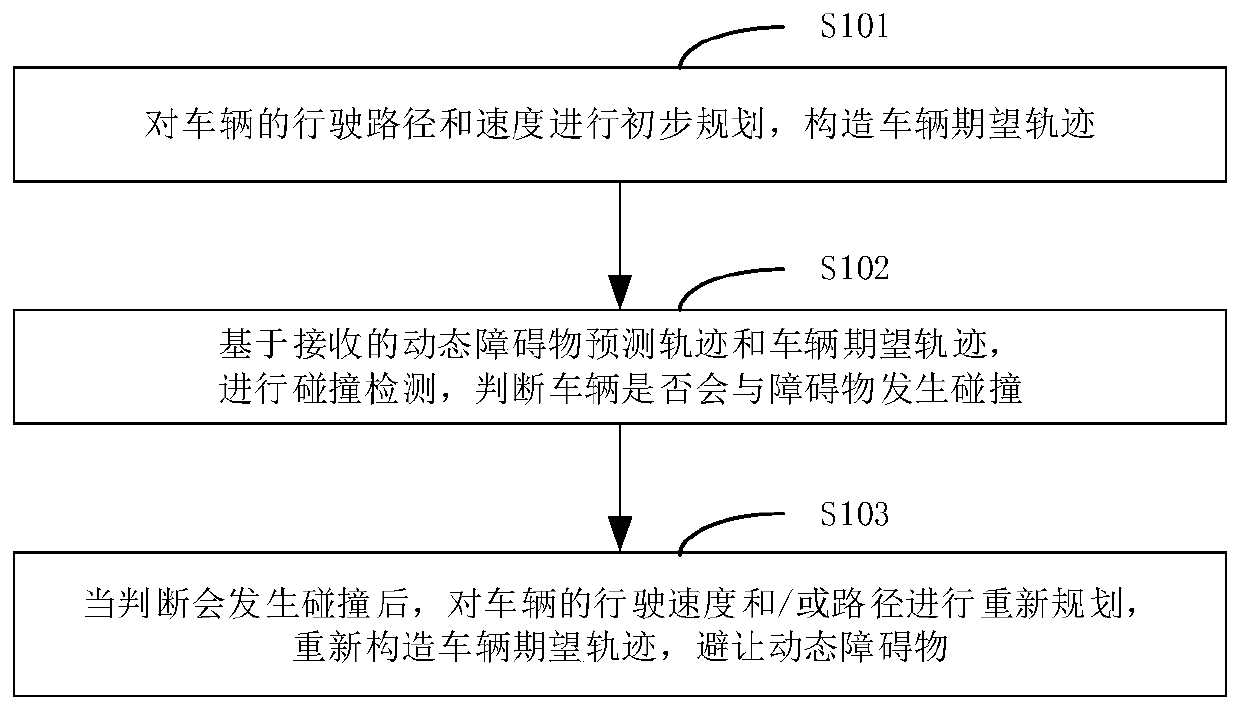
[0061] Such as figure 1 As shown, the specific methods include:
[0062] S101. Preliminary planning step: perform preliminary planning on the driving path and speed of the vehicle during the driving process of the vehicle, obtain the expected path and expected speed data of the vehicle, and construct the expected trajectory of the vehicle;
[0063] S102. Collision detection step: perform collision detection based on the received predicte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More