

Unmanned aerial vehicle biomimetic obstacle avoidance control system and method based on LGMD
A control system and obstacle avoidance technology, applied in general control systems, control/regulation systems, adaptive control, etc., can solve problems such as obstacle materials, textures, and background complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
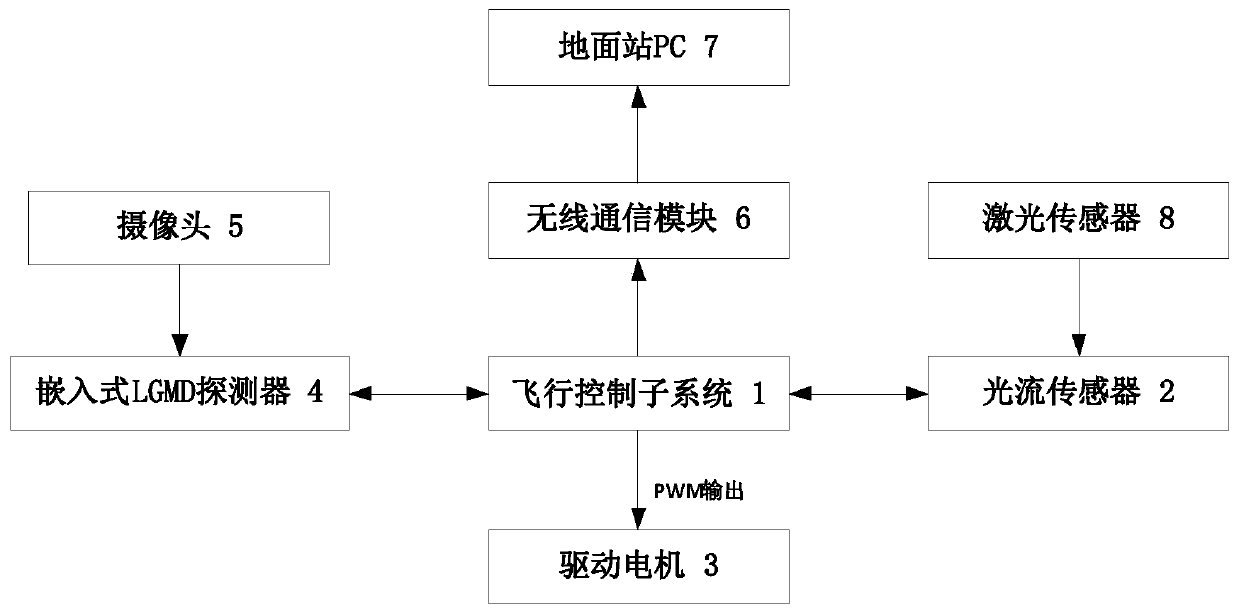
[0095] Such as figure 1 As shown, a UAV bionic obstacle avoidance control system based on LGMD, including flight control subsystem 1, optical flow sensor 2, drive motor 3, embedded LGMD detector 4, camera 5, wireless communication module 6 and ground station PC7; where:
[0096] Both the optical flow sensor 2 and the embedded LGMD detector 4 are electrically connected to the flight control subsystem 1 for information interaction;
[0097] Both the wireless communication module 6 and the drive motor 3 are electrically connected to the output end of the flight control subsystem 1;
[0098] The input terminal of the embedded LGMD detector 4 is signal-connected to the output terminal of the camera 5;
[0099] The wireless communication module 6 is wirelessly connected with the ground station PC7.
[0100] More specifically, the embedded LGMD detector 4 is provided with an LGMD neural network, and the video information collected by the camera 5 is calculated through the LGMD neu...
Embodiment 2
[0113] More specifically, on the basis of Embodiment 1, a bionic obstacle avoidance control method for UAV based on LGMD is provided, including the following steps:
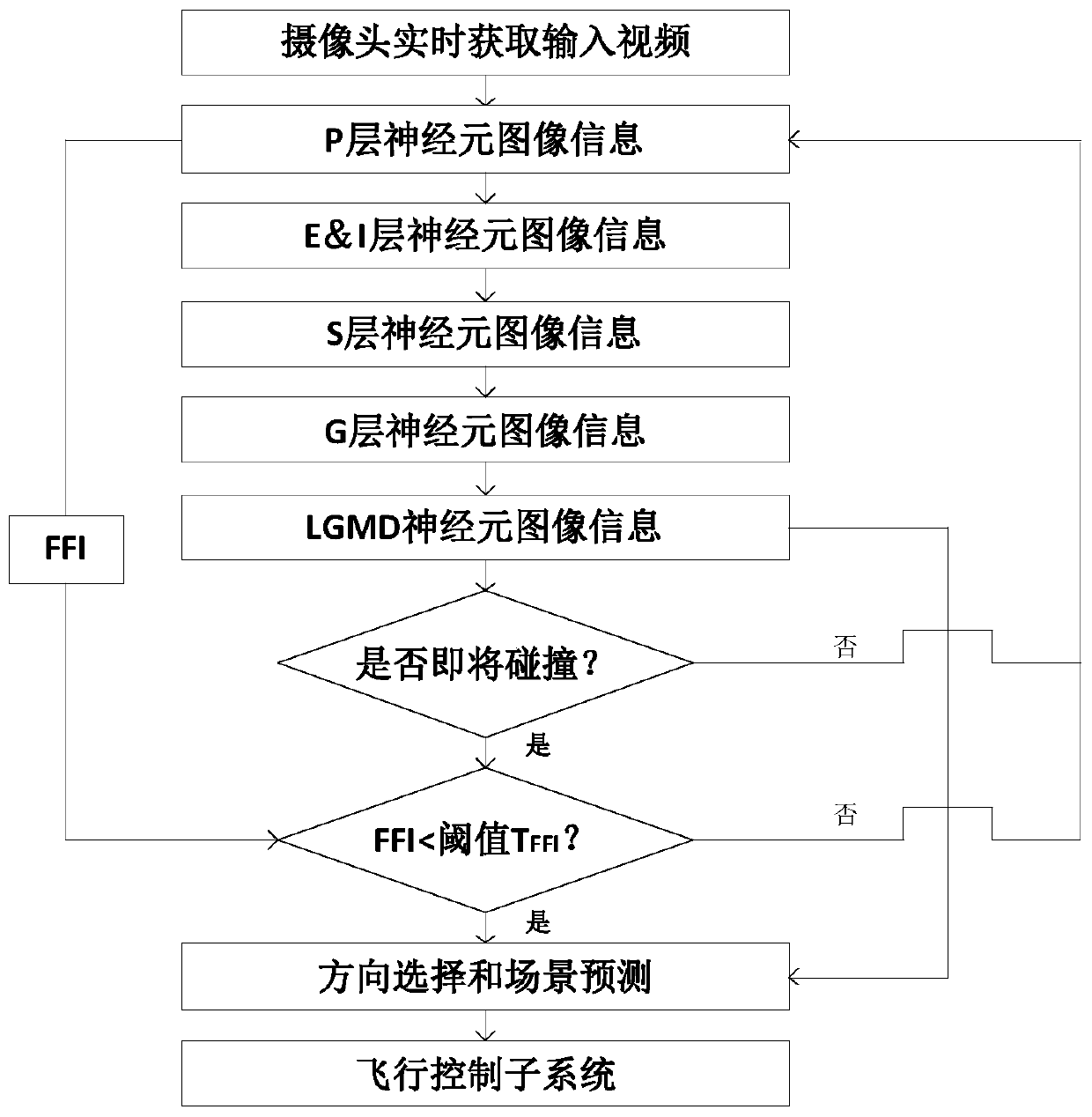
[0114] S1: do real-time video collection through the camera 5, and get the input video;
[0115] S2: The embedded LGMD detector 4 obtains the field of view image information of the input video, calculates the obstacle avoidance control command through the LGMD neural network, and outputs it to the flight control subsystem 1 to realize the obstacle avoidance control of the UAV.
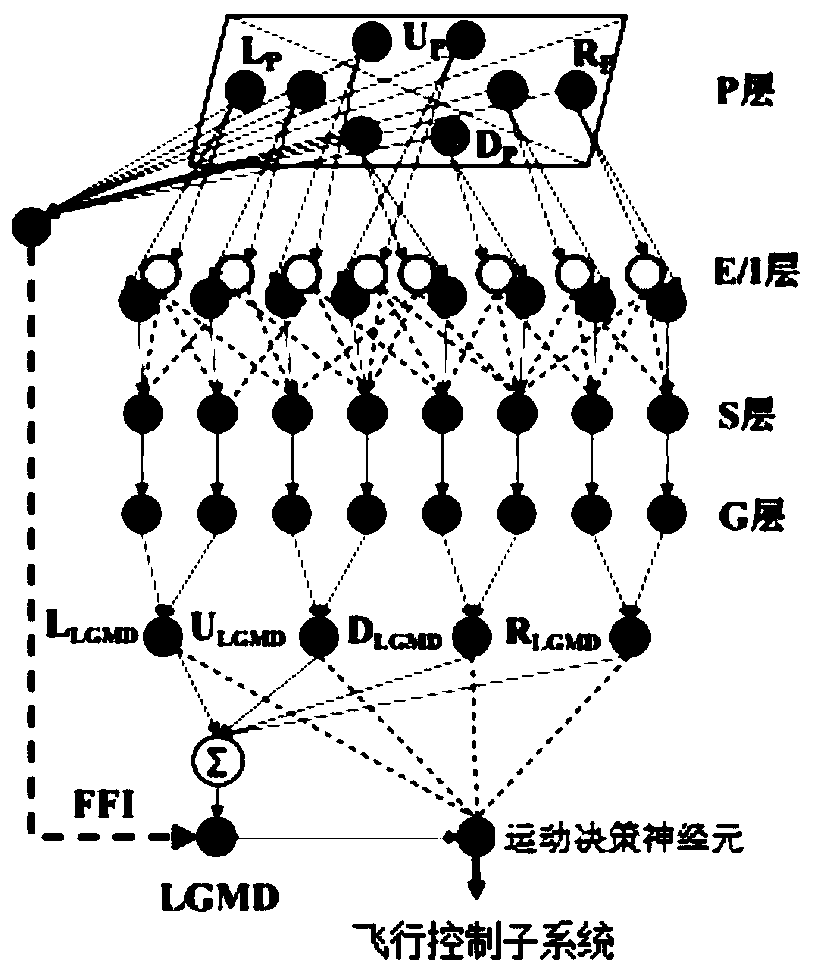
[0116] More specifically, such as image 3 As shown, the specific process of calculating the obstacle avoidance control instruction by the LGMD neural network is:
[0117] S21: P-layer neurons obtain the visual field image information of the input video, respond to the frame difference, and obtain the P-layer neuron membrane potential P f (x, y), specifically:
[0118] P f (x, y) = L f (x,y)-L f-1 (x, y); 1)
[0119] Among them: f ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More