

Time window online correction-based multi-AGV (Automated Guided Vehicle) path planning method
A path planning and time window technology, applied in two-dimensional position/channel control, vehicle position/route/height control, non-electric variable control, etc., can solve problems such as multi-AGV path conflicts, and achieve path conflicts and improve Accuracy and efficiency, the effect of reducing errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
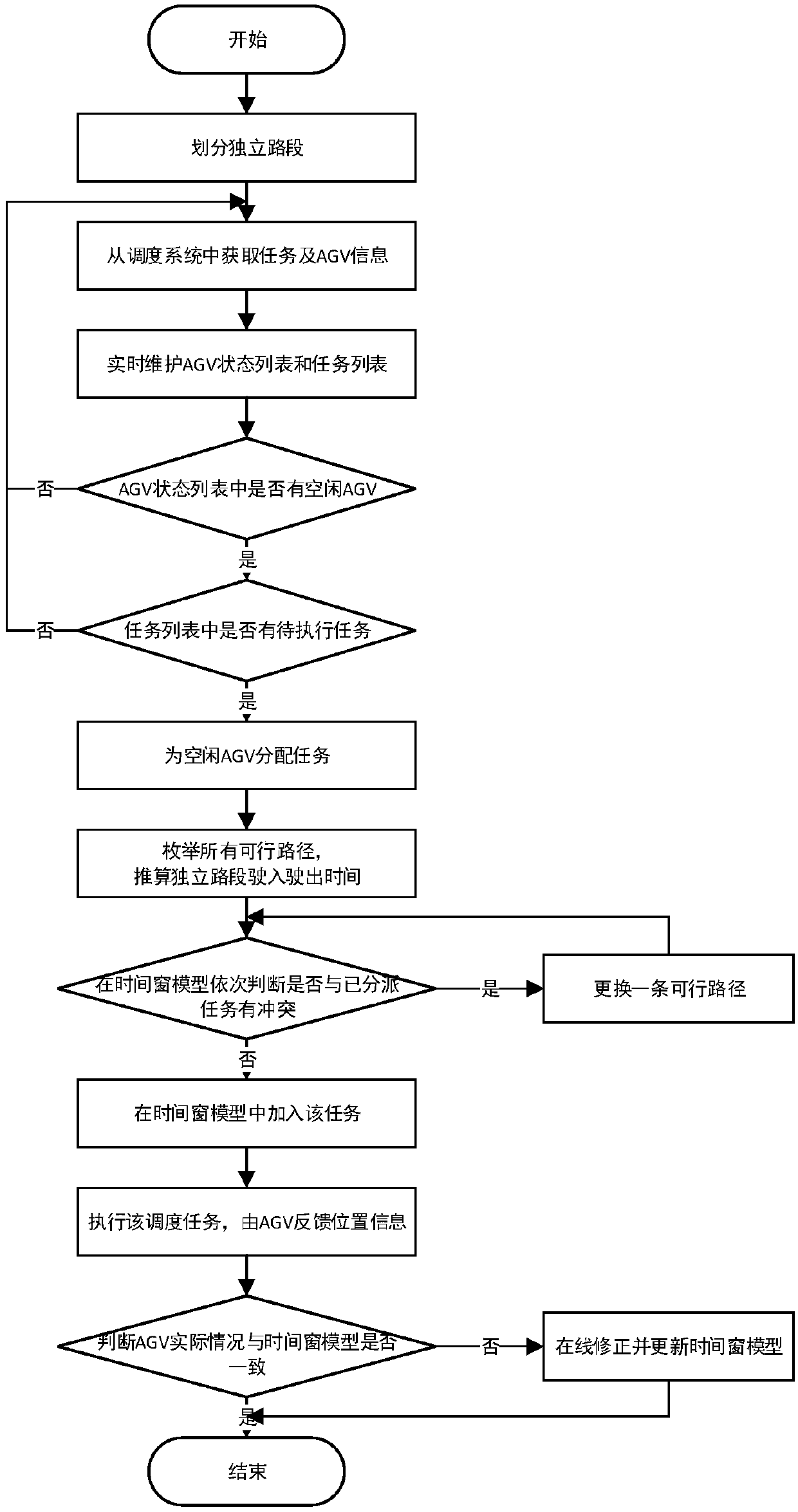
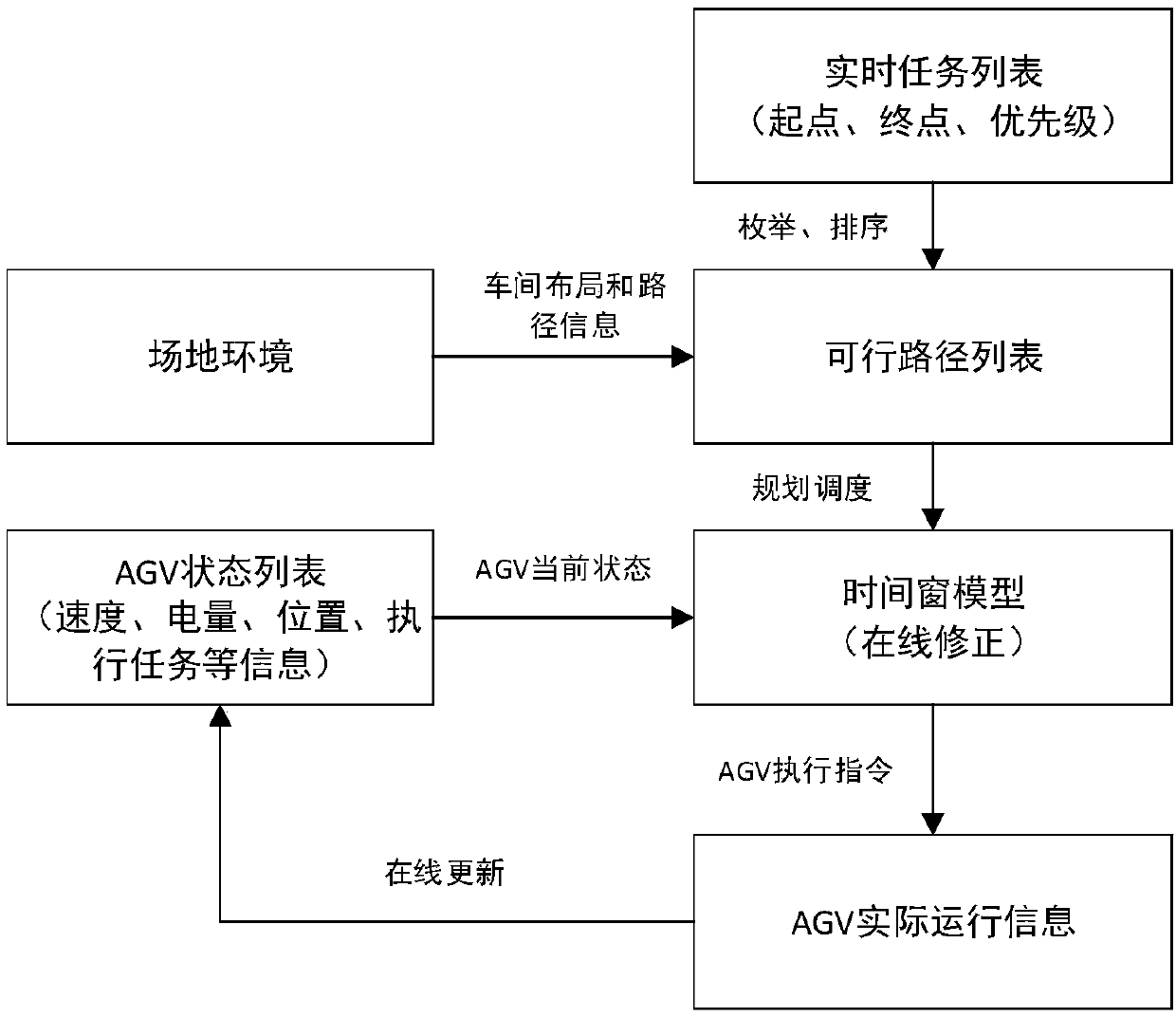
[0038] The present invention comprises the following steps:
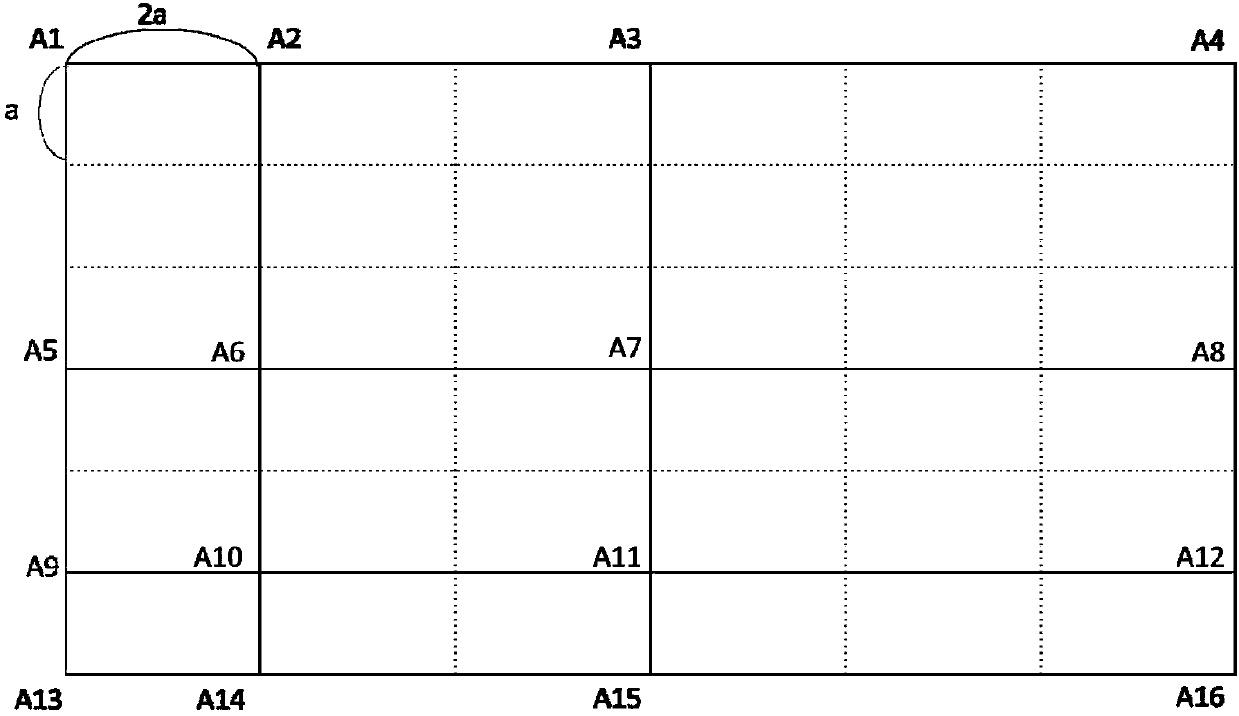
[0039] (1) According to the workshop layout and route information, extract the points where the AGV needs to operate (dock, change direction, charge or feedback information), including: workstation points, warehouse points, turning points, positioning points, charging points and backup points .
[0040] Station point: The equipment that needs to be loaded and unloaded by AGV in the workshop needs to arrange a station point, which is divided into a loading area and an unloading area. Among them, the loading area is used to store the goods to be processed transported by the AGV from the previous process; the unloading area is used to store the goods to be taken away after processing at this station. For the scheduling algorithm, when assigning tasks, they are uniformly assigned as w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More