

A Time Window Based Obstacle Avoidance Control Method
A control method and time window technology, applied in two-dimensional position/channel control, program control, comprehensive factory control, etc., can solve problems such as solving difficulties, collision conflicts, etc., to solve path conflicts, improve performance, and increase utilization efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
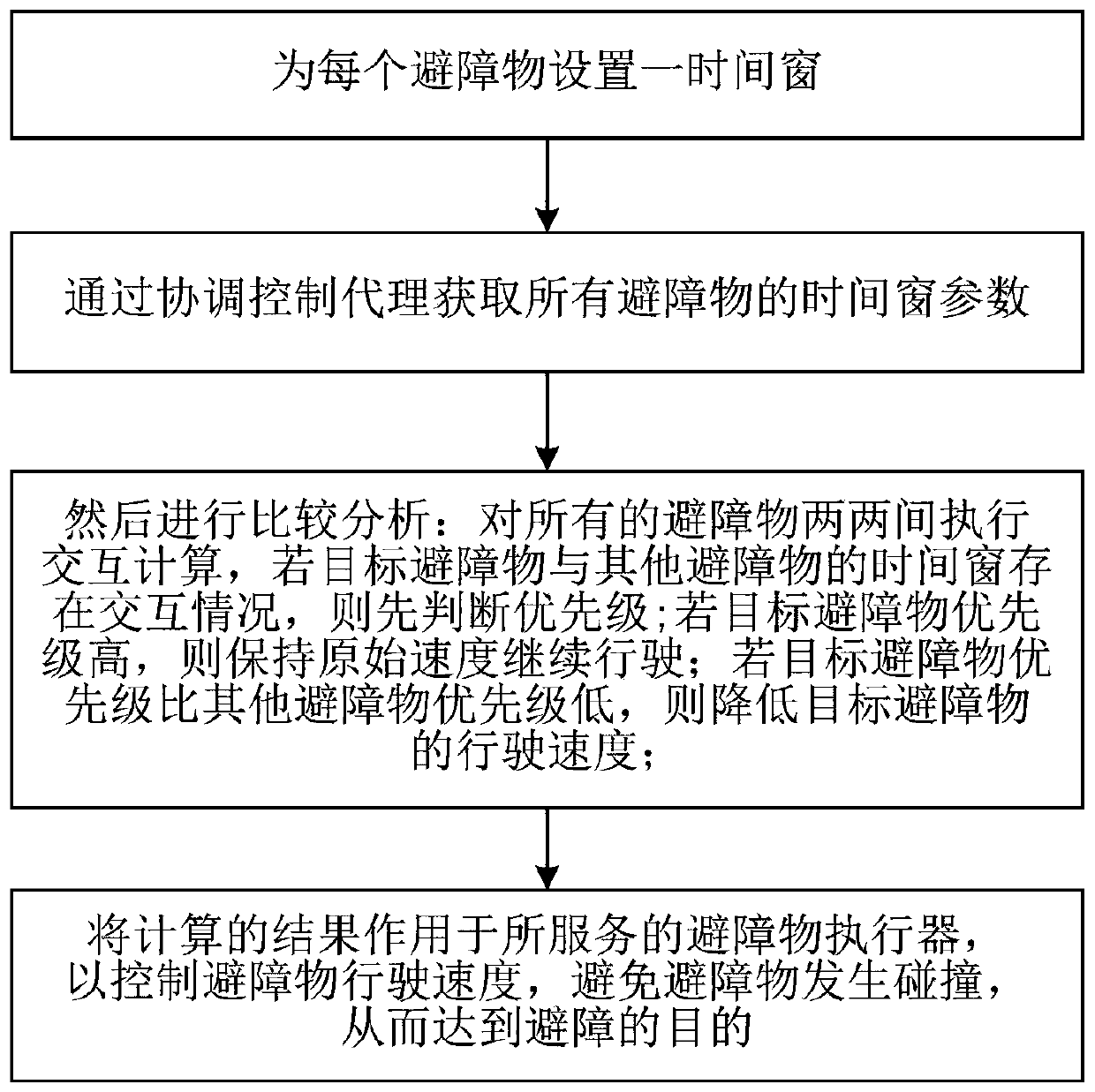
[0026] see figure 1 As shown, the obstacle avoidance control method based on the time window of the present invention includes:
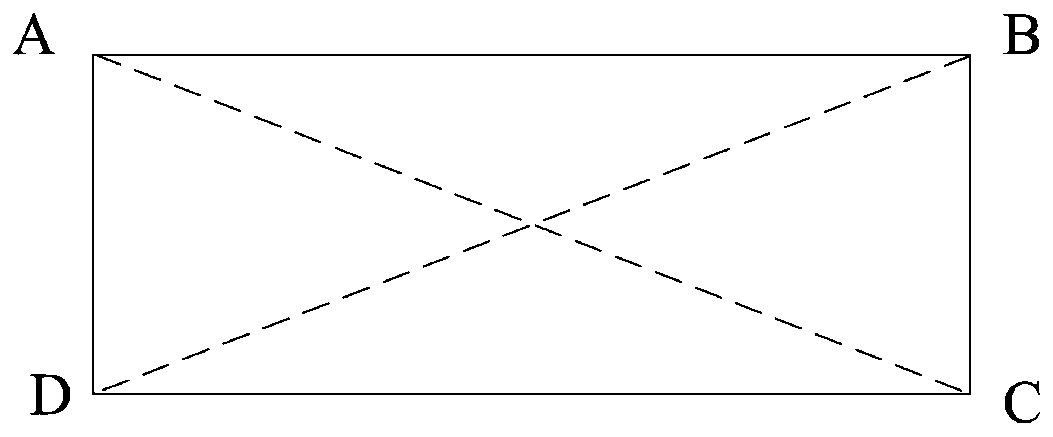
[0027] Step S1, setting a time window for each obstacle avoidance object, the size parameters of the time window are as follows:
[0028] Long X=Sy+1 / 2L+1 / 2(L*Sinθ+A*Cosθ),
[0029] Width Y=Sx+1 / 2L+1 / 2(L*Cosθ+A*Sinθ),
[0030] Among them, Sx: the displacement of the obstacle avoidance along the X-axis with uniform deceleration; Sy: the displacement of the obstacle with uniform deceleration along the Y-axis; L: the length of the obstacle itself; A: the width of the obstacle; θ: the obstacle The angle between the object axis and the horizontal direction;
[0031] Step S2, obtaining the time window parameters of all obstacle avoidance objects through the coordination control agent;
[0032] Step S3, and then perform comparative analysis: perform interactive calculations for all obstacle avoidance objects in pairs, and if there is an interaction bet...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More