

Path planning system and method based on multiple omni-directional mobile robots
A technology for path planning and omnidirectional movement, applied in control/regulation systems, instruments, non-electric variable control, etc., can solve problems such as mutual collisions, avoid motion collisions, reduce development difficulty, and improve flexibility and scalability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The purpose of the invention of the present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments, and the embodiments cannot be repeated here one by one, but the implementation of the present invention is not therefore limited to the following embodiments.
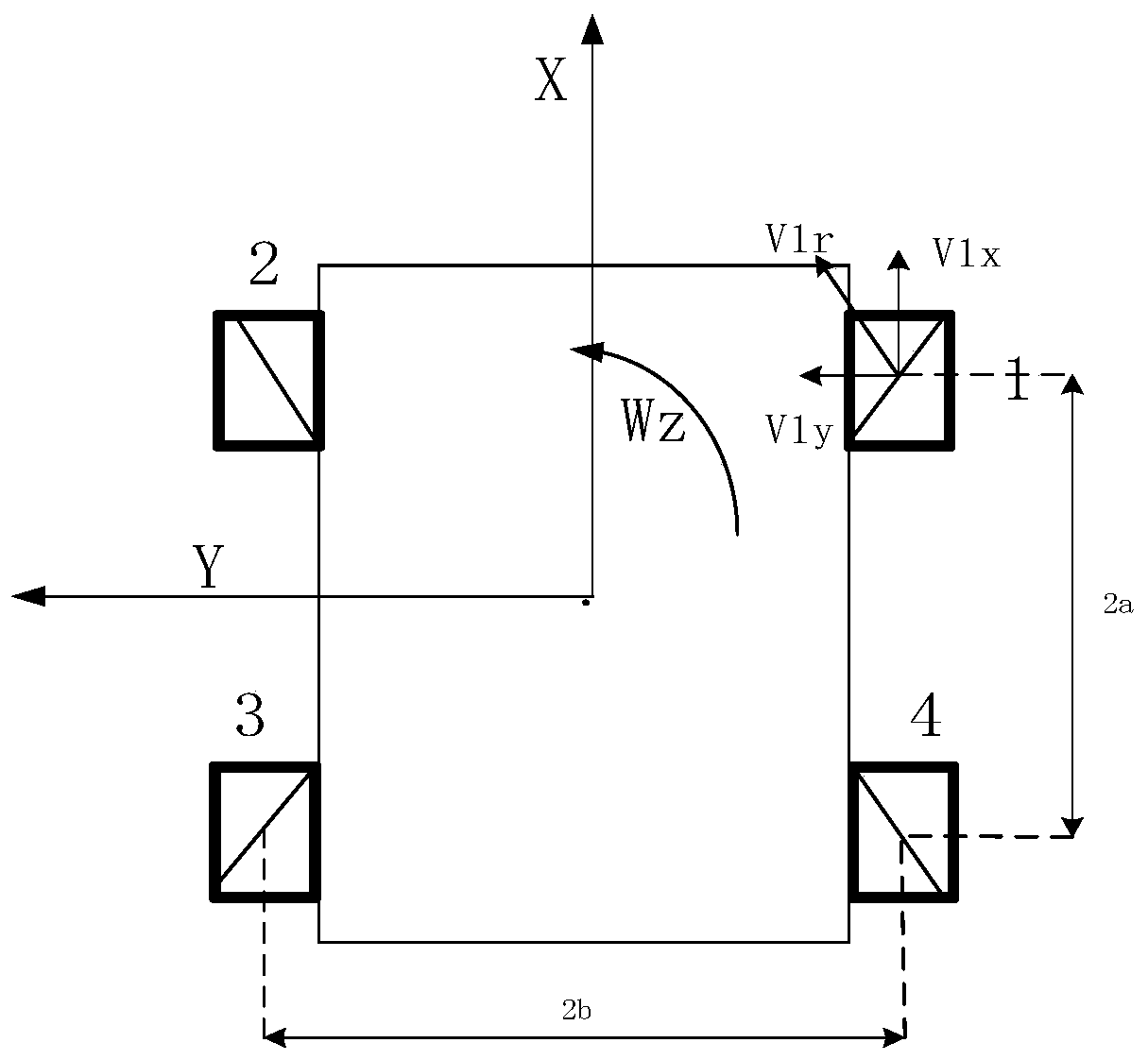
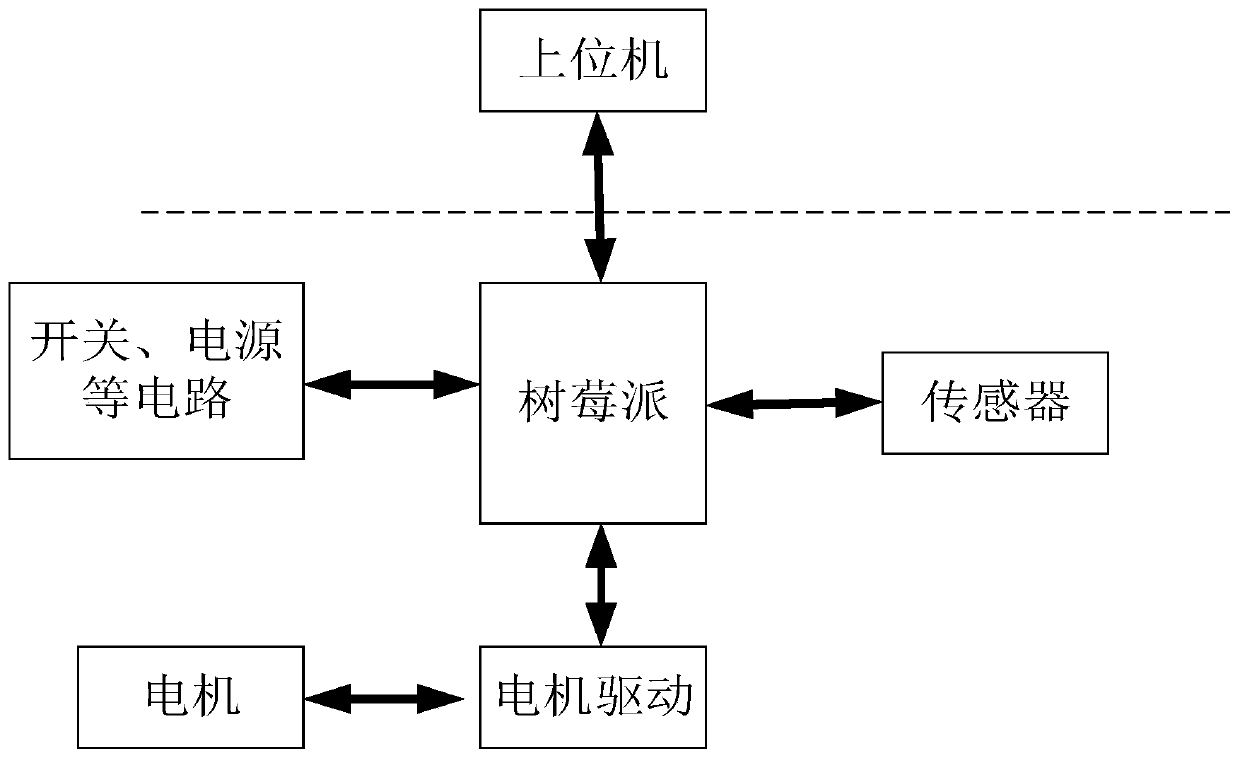
[0066] A path planning system based on multiple omnidirectional mobile robots, such as figure 2 As shown, it includes a robot, an upper computer, a motor drive system, and the bottom layer of the main control of the Raspberry Pi; the robot is driven by a mecanum wheel, and the upper computer system and the bottom layer of the main control of the Raspberry Pi are connected through a wireless local area network;
[0067] like figure 2 As shown, the upper computer, the bottom layer of the main control of the Raspberry Pi, and the control of the motor drive system are used. The three parts are relatively independent in structure and closely related....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More