

Pose sensing system and method for mobile robot
A mobile robot and sensing system technology, applied in the field of position and attitude sensing systems, can solve the problems of inability to estimate the robot attitude, cannot determine the robot attitude, and difficult to ensure real-time performance, so as to reduce the difficulty of development and maintenance and fast calculation speed , the effect of avoiding errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
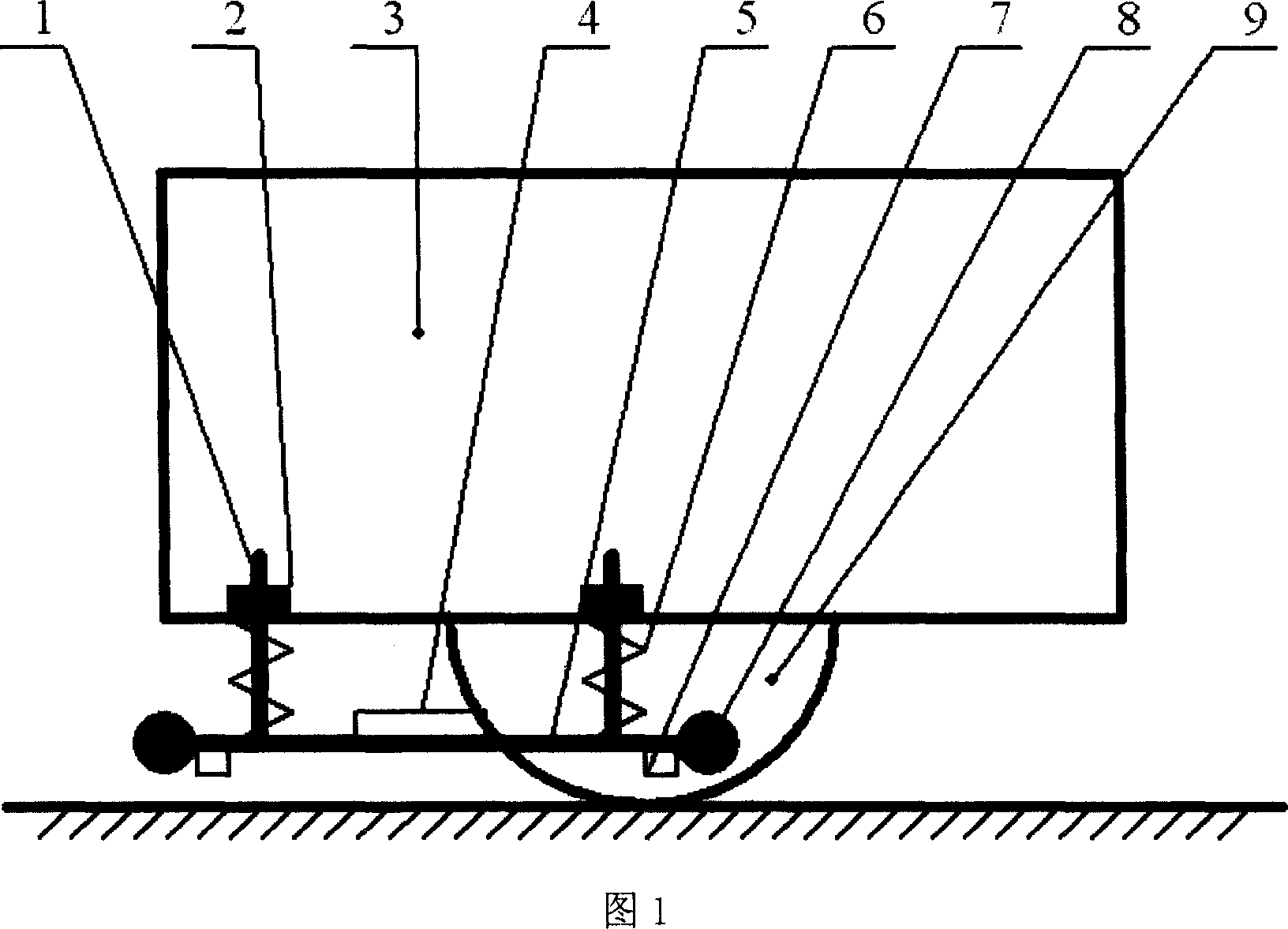
[0023]In Fig. 1: positioning screw 1, positioning nut 2, robot body 3, control processing circuit 4, sensor pressing mechanism 5, positioning spring 6, photoelectric sensor 7, universal ball 8, robot driving wheel 9.
[0024] As shown in Figure 1, the entire sensor spring pressing mechanism 5 can be fixed on the bottom of the robot by a positioning screw 1, a positioning nut 2, and a positioning spring 3, wherein a positioning screw 1 is installed on the motion center of the robot, and a positioning screw 1 is installed on the motion center of the robot. Positive direction. We can adjust the positioning nut 2 according to the actual situation to realize the adjustment of the length of the positioning screw rod 1 . Make sure that the photoelectric sensor is basically parallel to the ground and within an effective distance. Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More