

Vehicle target joint cognition method and system based on point cloud and image data
A technology of image data and point cloud data, applied in the field of vehicle target joint cognition method and system, can solve the problems of unmanned driving and low precision, and achieve high flexibility, generalization ability and strong generalization ability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The following will clearly and completely describe the technical solutions in the embodiments of the present invention in conjunction with the embodiments of the present invention. Obviously, the described embodiments are only part of the embodiments of the present invention, not all of them. Based on the implementation manners in the present invention, all other implementation manners obtained by persons of ordinary skill in the art without making creative efforts belong to the scope of protection of the present invention.
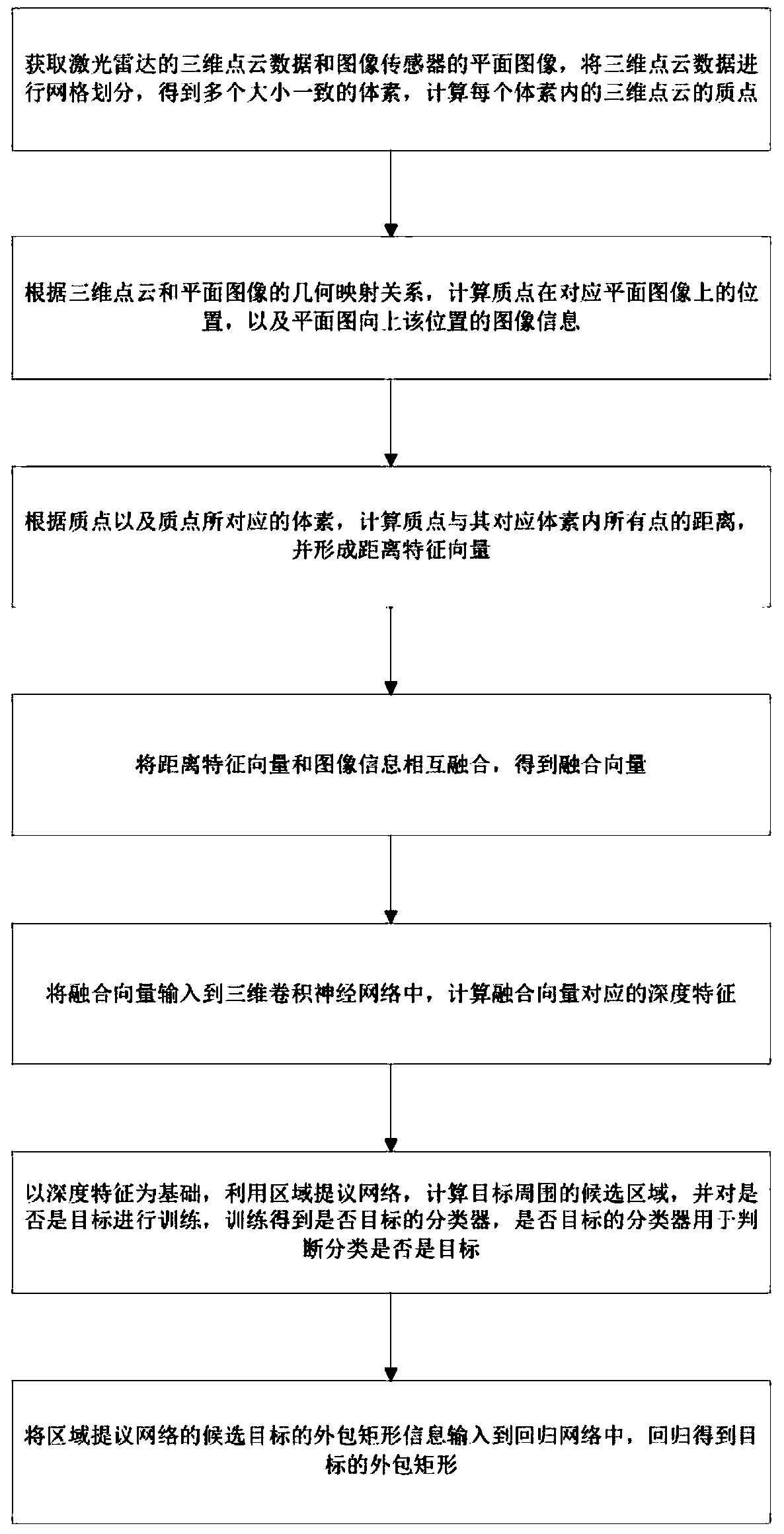
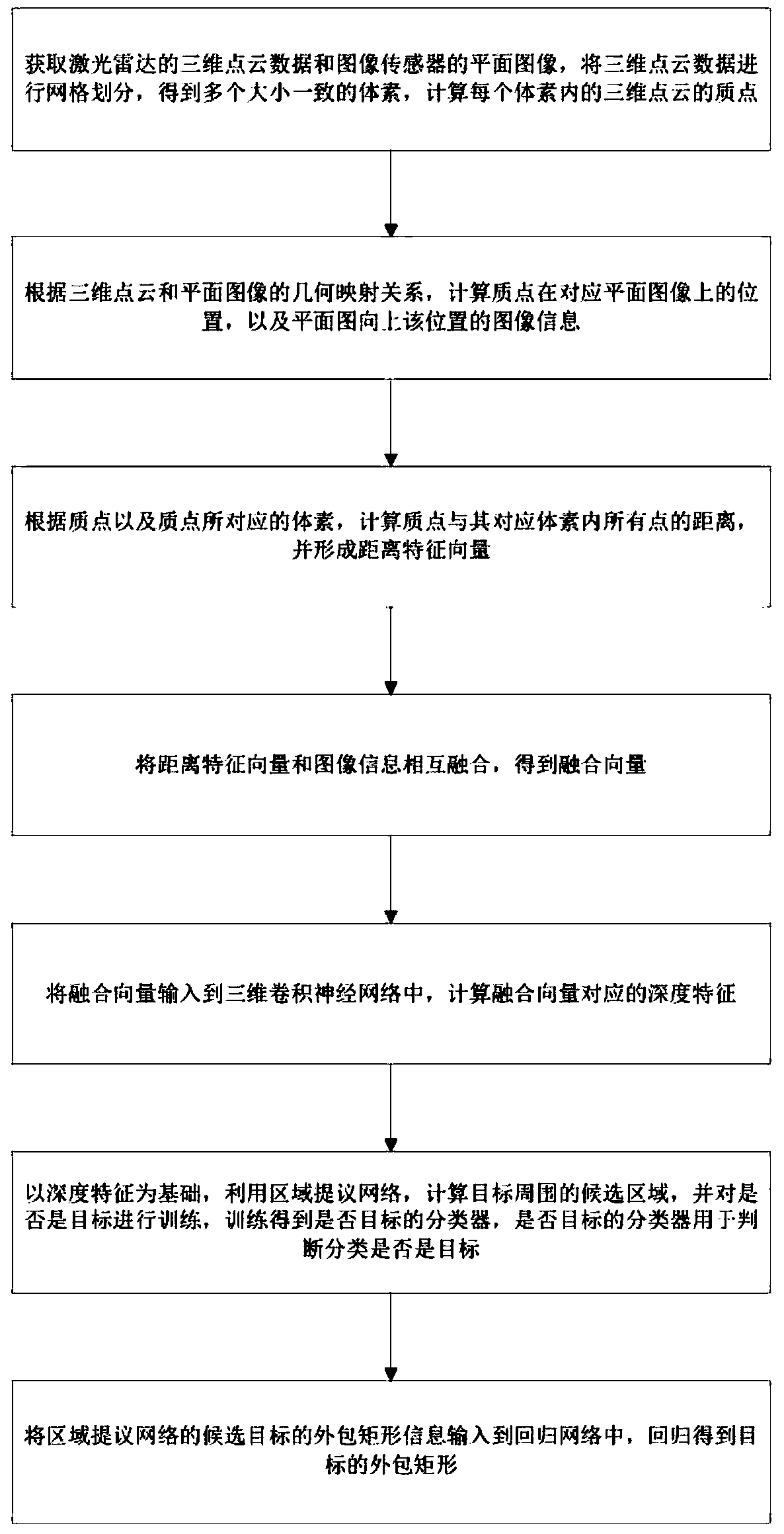
[0029] Such as figure 1 As shown, the vehicle target joint cognition method based on point cloud and impact data of the present invention comprises the following steps:
[0030] Step 1. Obtain the 3D point cloud data of the lidar and the plane image of the image sensor, divide the 3D point cloud data into grids, obtain multiple voxels of the same size, and calculate the mass points of the 3D point cloud in each voxel;
[0031] Step 2. According to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More