Unmanned aerial vehicle cooperative search method for targets with non-continuous observation characteristics
A search method and target search technology, applied in the design field of UAV collaborative search method, can solve the problems of shortening the time required for search, inaccuracy, etc. The effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] Exemplary embodiments of the present invention will now be described in detail with reference to the accompanying drawings. It should be understood that the implementations shown and described in the drawings are only exemplary, intended to explain the principle and spirit of the present invention, rather than limit the scope of the present invention.
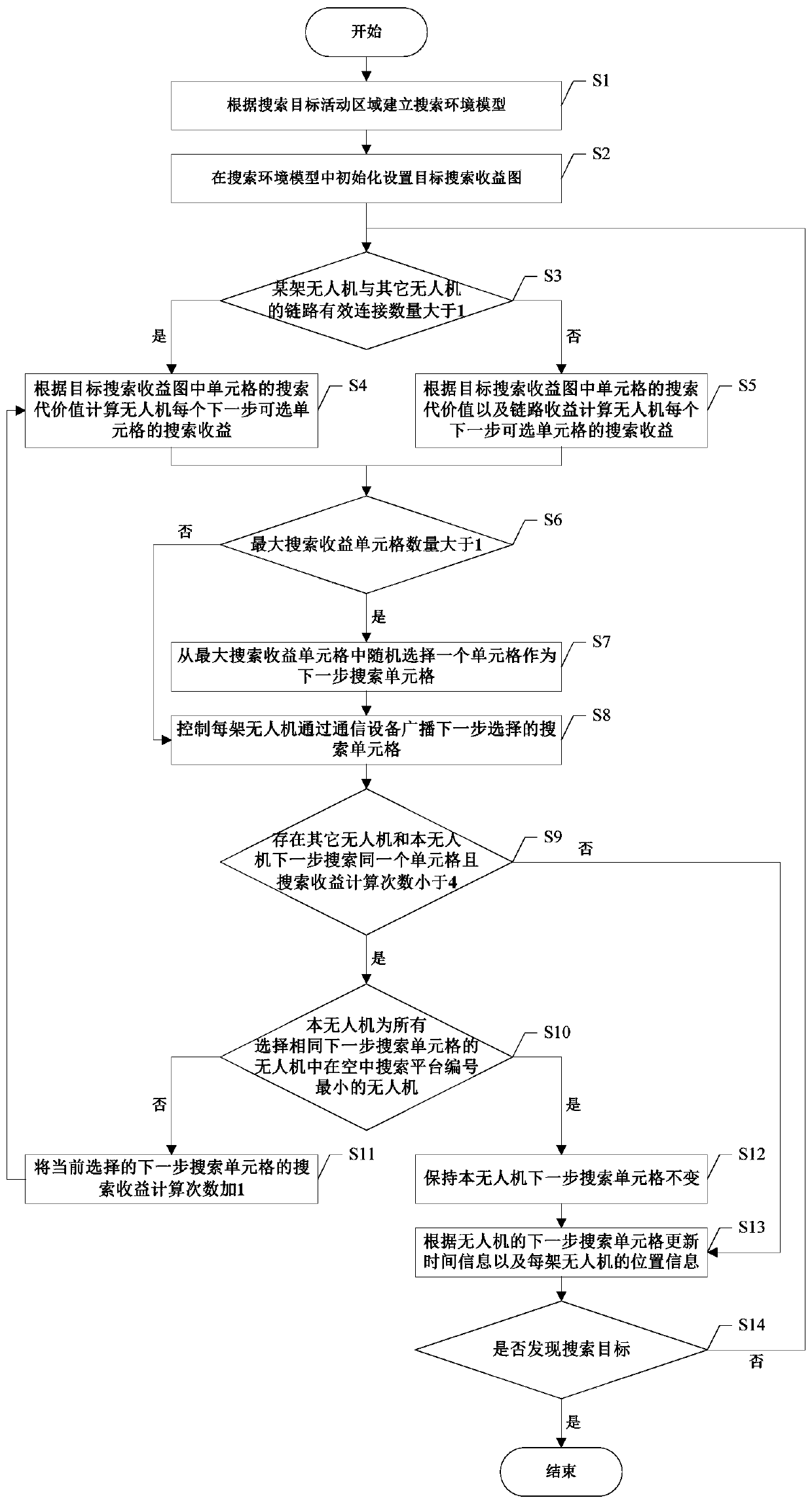
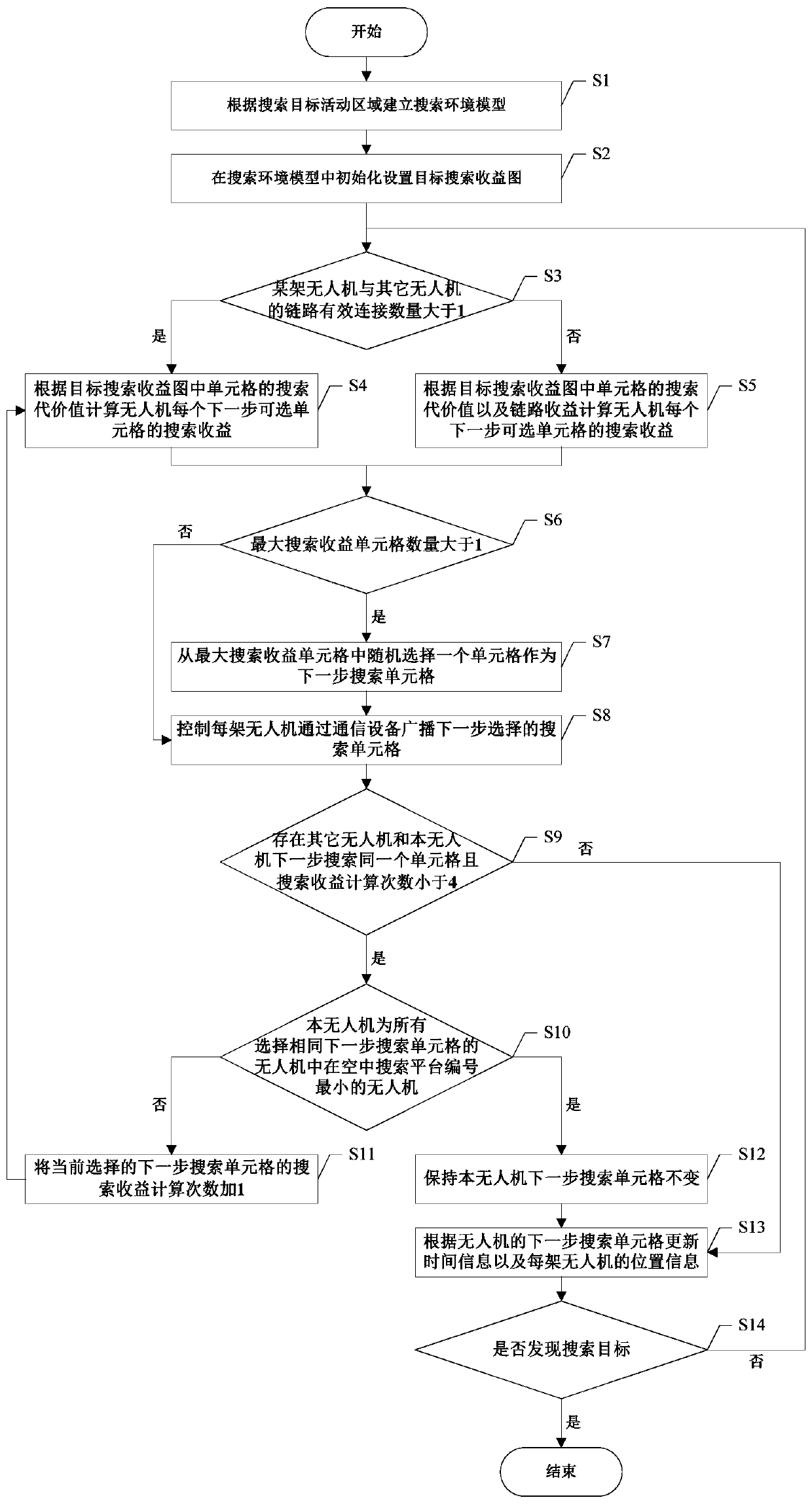
[0044] The embodiment of the present invention provides a cooperative search method for UAV targets with discontinuous observation characteristics, such as figure 1 As shown, the following steps S1-S14 are included:
[0045] S1. Establish a search environment model according to the search target activity area.
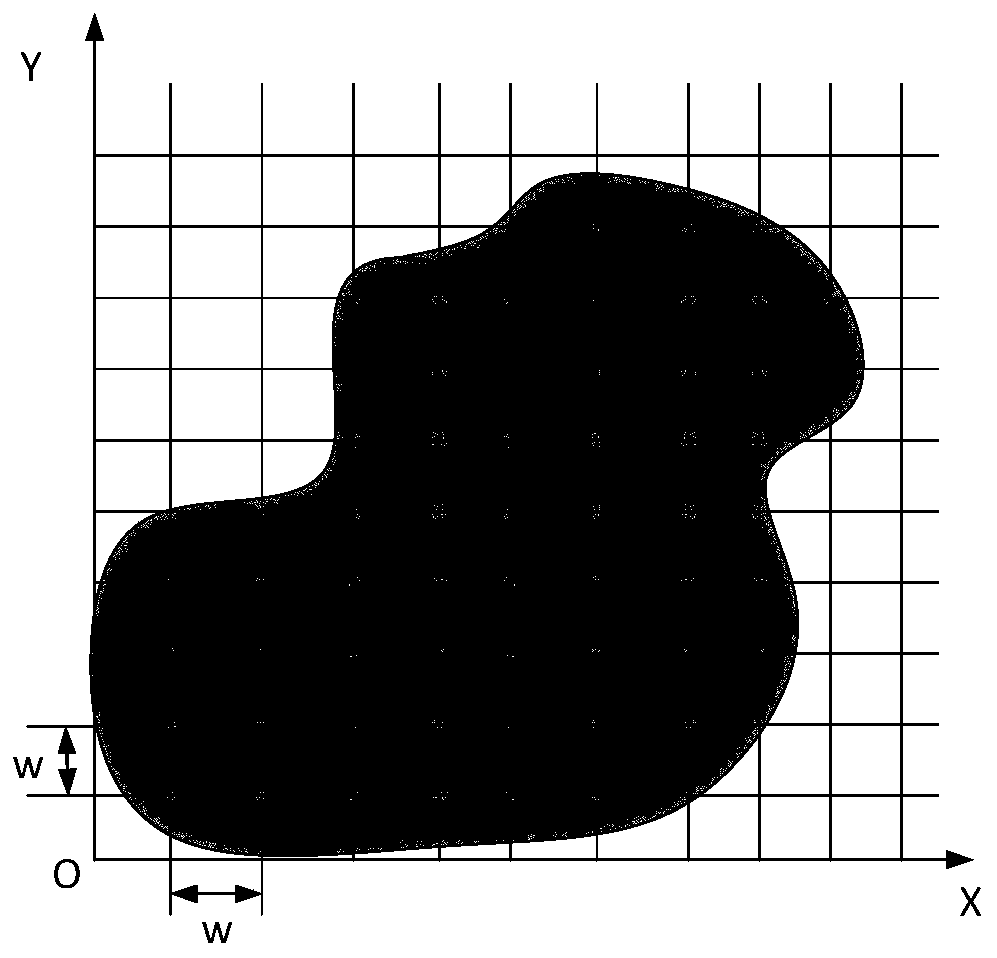
[0046] In the embodiment of the present invention, the influence of factors such as terrain is not considered, the ground target can move in the target area, and the unmanned aerial vehicle can fly over the target area, and the search environment model finally established is as follows: figure 2 shown. figur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More