Task-distributing and path-planning method applied to multilayer SOM heterogeneous welding robots
A welding robot and path planning technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of unguaranteed quality, harsh operating environment, low efficiency, etc., to improve robustness and versatility, and to minimize path cost. Excellent and robust effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
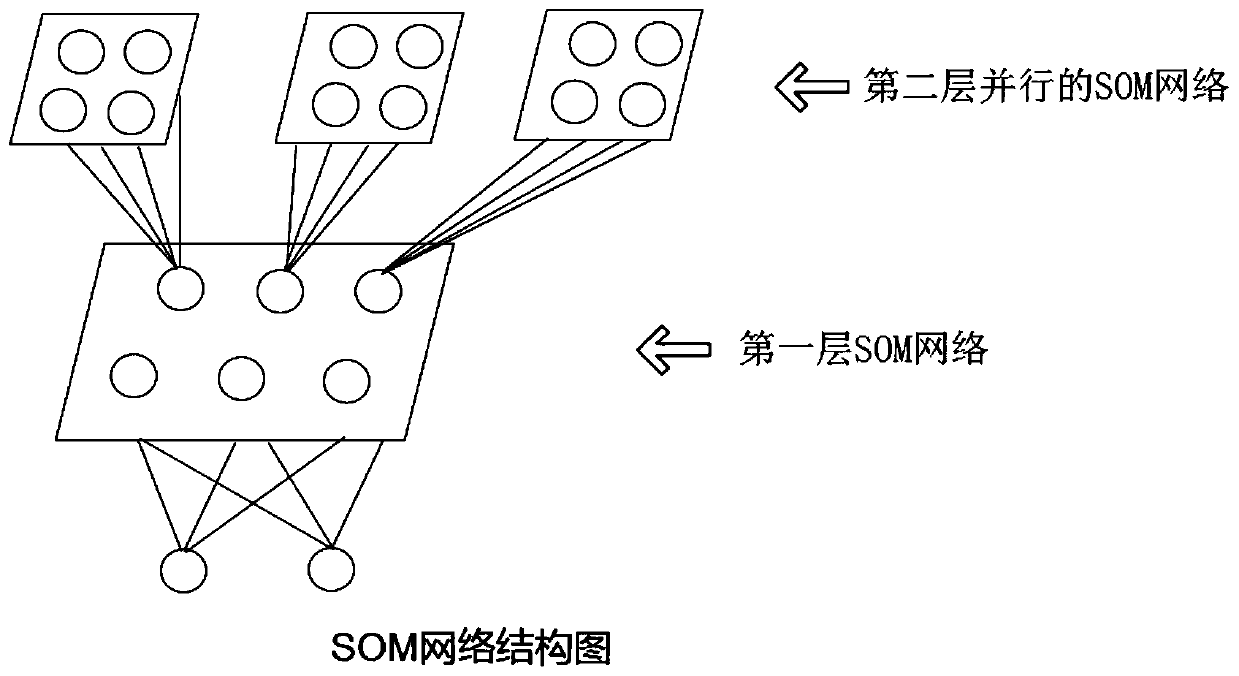
[0060] Such as figure 1 , 2 As shown, the task allocation and path planning method of the multi-layer SOM heterogeneous welding robot disclosed in this embodiment, the specific implementation steps are as follows:
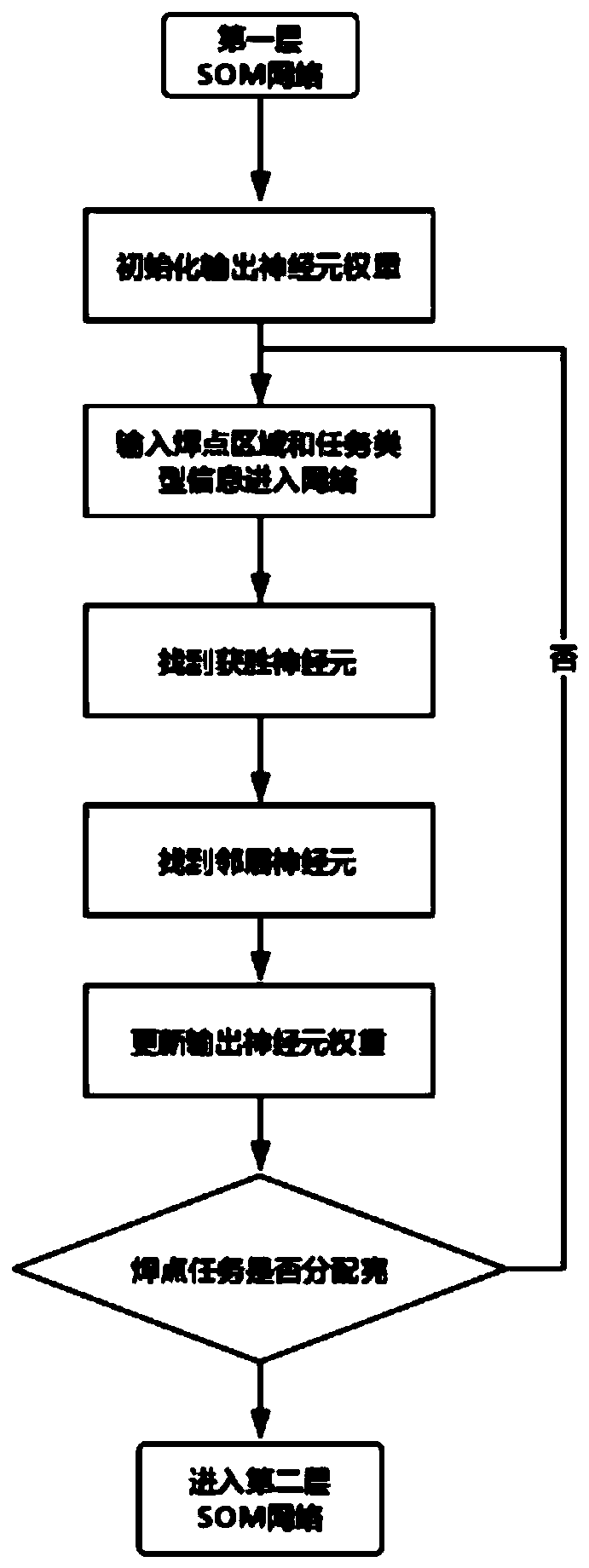
[0061] Step 1: Establish the first-layer SOM neural network model according to the task type of the solder joint, the position area information of the solder joint and the welding robot, train the first-layer SOM neural network model, and complete the rough task assignment of the heterogeneous welding robot system, Output the welding task points required by various types of heterogeneous welding robots to improve the robustness and versatility of the heterogeneous welding robot system.
[0062] Step 1.1: According to the coordinate positions of welding task points and heterogeneous welding robots, the welding task points and heterogeneous welding robots are divided into regions.
[0063] Table 1 Welding task points
[0064]
[0065]
[0066] Table 2 Hetero...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com