

A Registration Method of Terrestrial Laser Point Cloud
A laser point cloud and registration technology, applied in the field of three-dimensional reconstruction, can solve the problems of registration errors, large amount of calculation, robustness of anti-noise performance and insufficient registration efficiency, and achieves fast registration speed and registration accuracy. high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
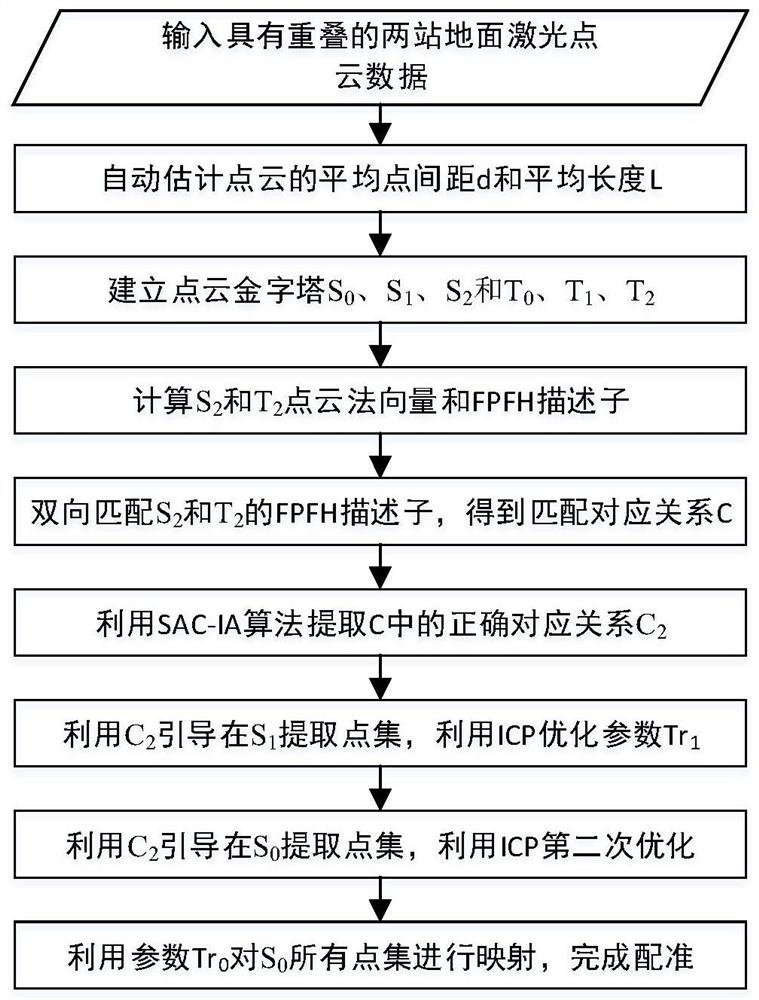
[0018] Step 1: Read in the source point cloud S with different perspectives collected by the point cloud acquisition device 0 and the target point cloud T 0 Two-viewpoint cloud;
[0019] Step 2: Automatically estimate the average point spacing d of the point cloud mean and the average length L mean ;
[0020] Step 2.1: Randomly sample K in the two point clouds respectively 0 (K 0 =1000) sampling points, for each sampling point P i the k 1 Neighborhood Q is analyzed, k 1 Take the empirical value 4, and calculate each point P in the neighborhood j to point P i distance d ij , calculate the point P i Neighborhood point to P i The average distance of P as i Estimated value d of the point cloud average spacing around the point i ;
[0021]
[0022] Step 2.2: Use the same method to calculate the average point distance d of the point cloud near each sampling point i , and then take the average point distance of the point cloud near all sampling points as the averag...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More