

Point Cloud Registration Method Based on Neighborhood Rotation Volume
A point cloud registration and neighborhood point technology, applied in the field of 3D images, can solve the problems of slow registration speed, many iterations, and poor noise resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
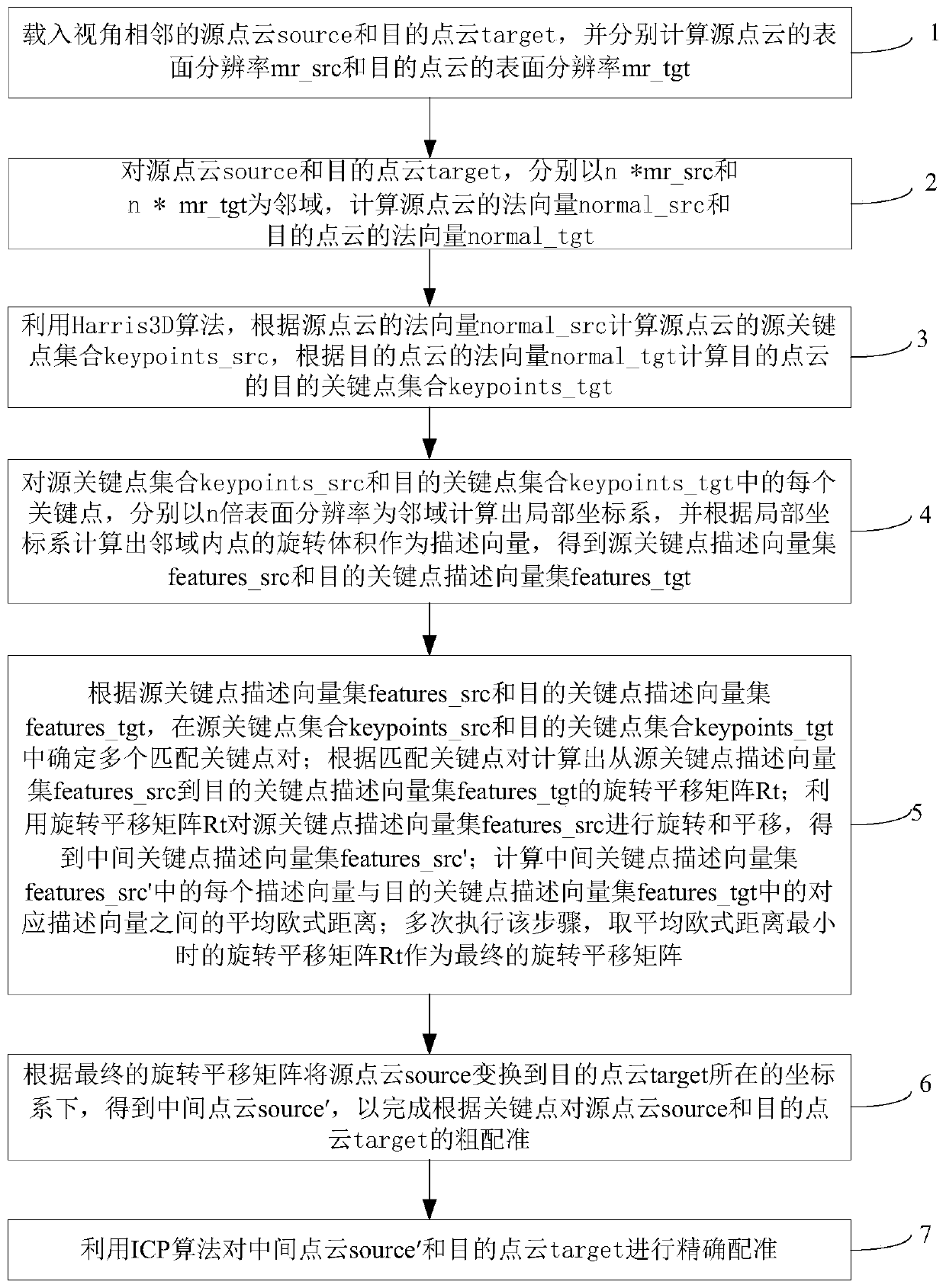
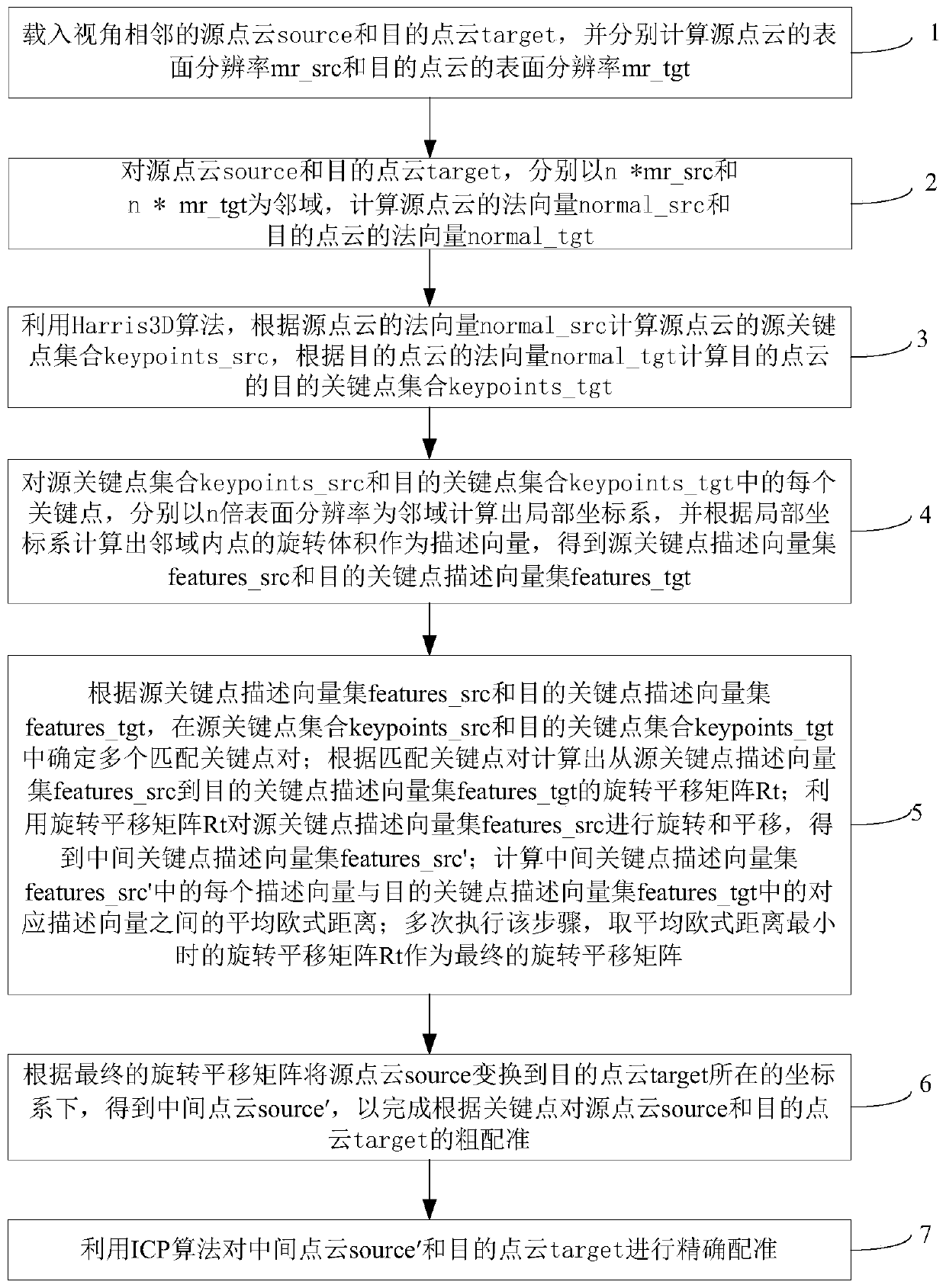
[0052] The present invention will be further described in detail below in conjunction with the drawings and embodiments.
[0053] At present, in order to improve the efficiency of point cloud registration, reduce the number of iterations in the registration process, and solve the problem of poor noise resistance, many methods use first to register the key points of the point cloud in order to complete the registration between the two point clouds. Coarse registration enables the two point clouds to have a good initial position, and then uses ICP or its improved algorithm to finely register the point clouds, so as to ensure that a correct and complete 3D point cloud model is obtained. In the point cloud registration process of the present invention, the key points of the two point clouds are also extracted first, and the key points of the point clouds are first registered to complete the coarse registration between the two point clouds, and then use ICP or Its improved algorithm p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More