

Method for team formation and separation of cooperative adaptive cruise control vehicle team
An adaptive cruise and collaborative technology, applied in the fields of collaborative driving and traffic management, it can solve problems such as driver loss, large traffic energy consumption, and inability to precisely control the distance between vehicles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
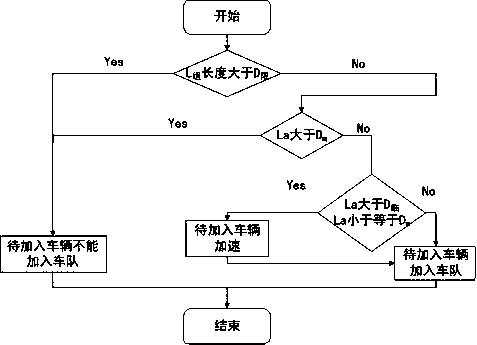
[0133] A single vehicle joins the convoy, by default it joins the tail of the convoy and all vehicles drive in one lane, see attached Figure 4 :
[0134] Suppose there are 10 vehicles in the driving fleet, and the distance between two adjacent vehicles is a safe distance D s =50 meters, then L 原 =10×4.5+(10-1)×50=900 meters, L 组 = L 原 +80+4.5=984.5 meters, the minimum distance for the proposed team.
[0135] Only when the length L of the proposed fleet is satisfied at the same time 组 No more than 1000 meters and the distance L between the rear vehicle of the convoy and the vehicle to be added a A single vehicle can only join a moving convoy within a distance of no more than 200 metres.
[0136] L 组 =984.5m<1000m, satisfying that the length of the proposed convoy should not exceed 1000m.
[0137] 1) L a = 60 meters, the vehicles to be joined can realize car-following and join the convoy.
[0138] 2) L a = 120 meters, the vehicle to be joined can accelerate to catch ...
Embodiment 2
[0141] A single vehicle joins the convoy. By default, the vehicle to be added is that the driving convoy is located in the adjacent lane and joins the middle of the driving convoy. See the attached Figure 9 :
[0142] When a single vehicle joins the middle of the driving fleet, the vehicle to be added must be in the adjacent lane first, and through the communication equipment between the vehicles, the joining vehicle sends a request to join the fleet, and the driving fleet responds after receiving the request to join the fleet , For example, there are currently 4 vehicles in the fleet, which are respectively No. 1, No. 2, No. 3, and No. 4 cars. The vehicle to be added is No. 5, and No. 5 car requests to join No. 2 and No. 3 cars Firstly, it is judged whether the length of the proposed convoy after joining exceeds the critical distance that allows the vehicle to accelerate to achieve car-following, which is D m , the length of the proposed convoy L 组 =168+80+4.5=252.5 meters...
Embodiment 3
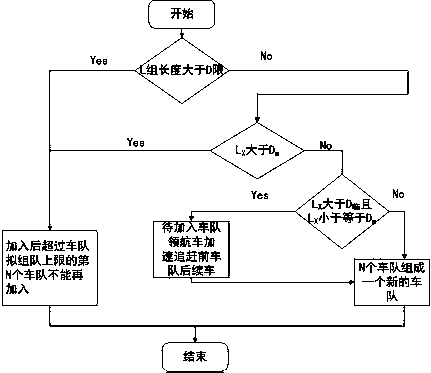
[0146] N fleets plan to form a new fleet in the same lane, N≥2, N is a positive integer, see attached Figure 5 :
[0147] When multiple teams form a team, it is assumed that there are 4 teams to form a team, and the original team lengths are L 1 , L 2 , L 3 , L 4 , and each convoy has 4 vehicles, the length of the proposed convoy is L 组 =168×4+80×3=912 meters. Note: The length of the original fleet is 168 meters = 4.5×4+50×3 meters.
[0148] Only when the length of the proposed convoy does not exceed 1000 meters and the distance L between the rear car of the previous convoy and the leading car of the subsequent convoy is satisfied X In the case of no more than 200 meters, two teams can form a new team.
[0149] L 组 =912m<1000m, satisfying that the length of the proposed convoy should not exceed 1000m.
[0150] Suppose L X1 =90, L X2 =100, L X3 =120, all 4 teams are within the allowable range of car-following, L X1 ≤200, L X2 ≤200,L X3 ≤200, the four teams can f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More