

A binocular point cloud generation method and system
A point cloud generation, binocular technology, applied in image analysis, image enhancement, instruments and other directions, can solve problems such as high noise, large deviation of point cloud generation, and fisheye cameras cannot be well implemented.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] Exemplary embodiments of the present disclosure will be described in more detail below with reference to the accompanying drawings. Although exemplary embodiments of the present disclosure are shown in the drawings, it should be understood that the present disclosure may be embodied in various forms and should not be limited by the embodiments set forth herein. Rather, these embodiments are provided for more thorough understanding of the present disclosure and to fully convey the scope of the present disclosure to those skilled in the art.
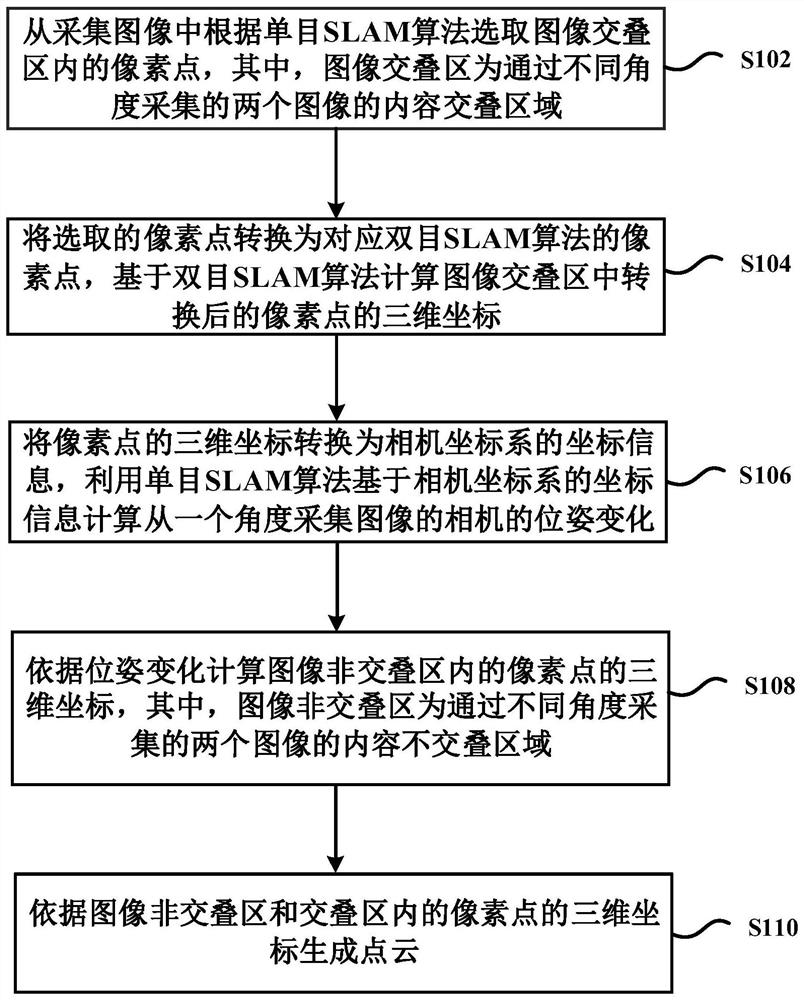
[0040] In order to solve the above technical problems, an embodiment of the present invention provides a binocular point cloud generation method, figure 1 A schematic flowchart of a method for generating a binocular point cloud according to an embodiment of the present invention is shown. see figure 1 , the method at least includes step S102 to step S110.
[0041] Step S102, selecting pixels in the image overlapping area from the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More