Remote sensing target detection method based on contourlet grouping characteristic pyramid convolution
A feature pyramid and target detection technology, applied in the field of image processing, can solve the problems of missed detection, blurred edges, small target size, etc., and achieve the effect of rich input, improved detection accuracy, and improved accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0041] In the prior art, due to the large size of the optical remote sensing image, low resolution, small target size, and blurred edges of the target, the existing methods often cannot learn the characteristics of small targets well when performing target detection on optical remote sensing images. This leads to low accuracy for small targets.
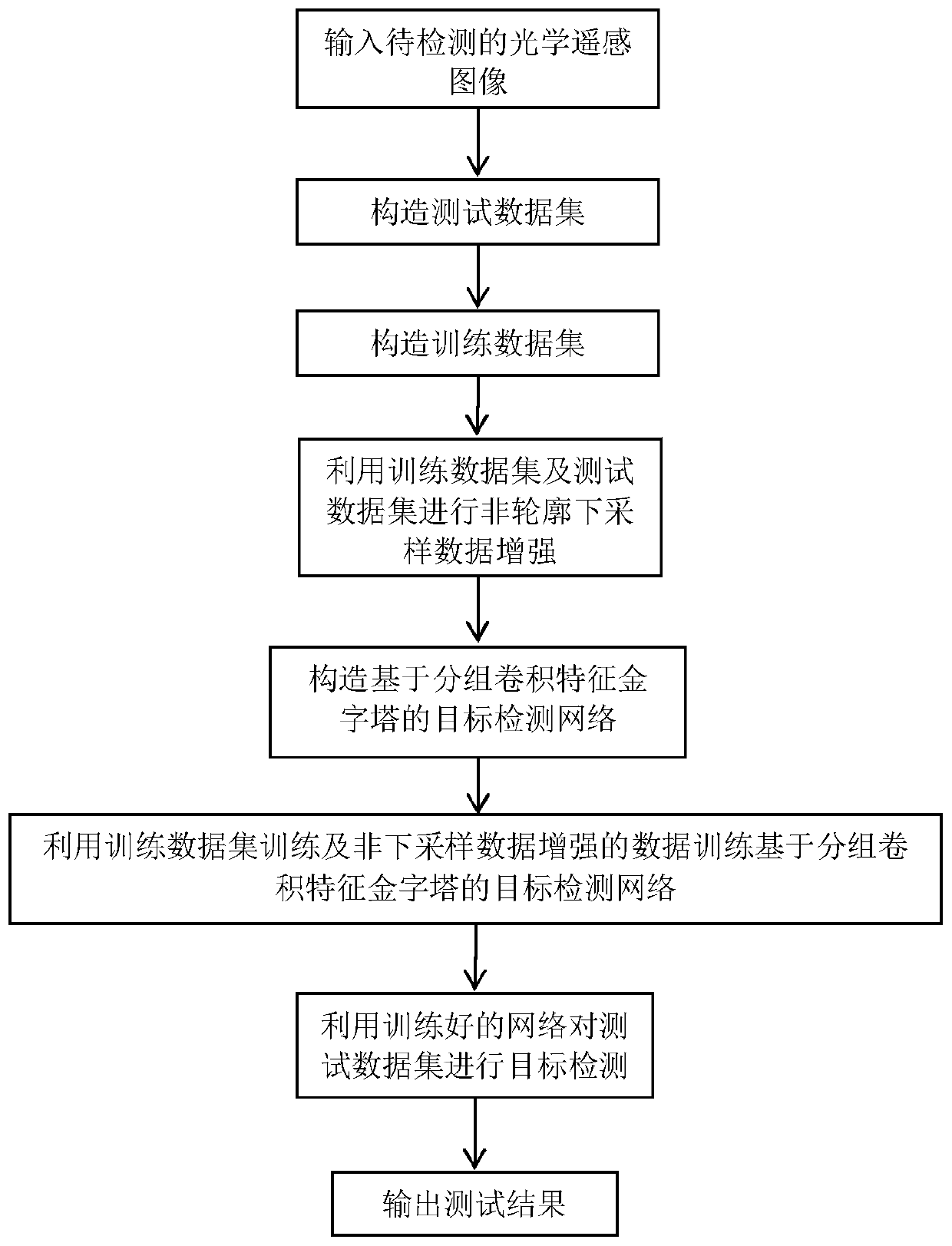
[0042] The present invention has carried out research for this present situation, proposes a kind of remote sensing target detection method of contourlet grouping feature pyramid convolution, see figure 1 , the present invention first uses non-contourlet downsampling transformation for edge enhancement, and uses group convolution and channel breakup technology to enable the network to simultaneously input the pre-enhanced image and the enhanced image and automatically learn the feature combination as the depth The input of the feature pyramid convolutional network, the extracted features are more suitable for target detection tasks, a...
Embodiment 2
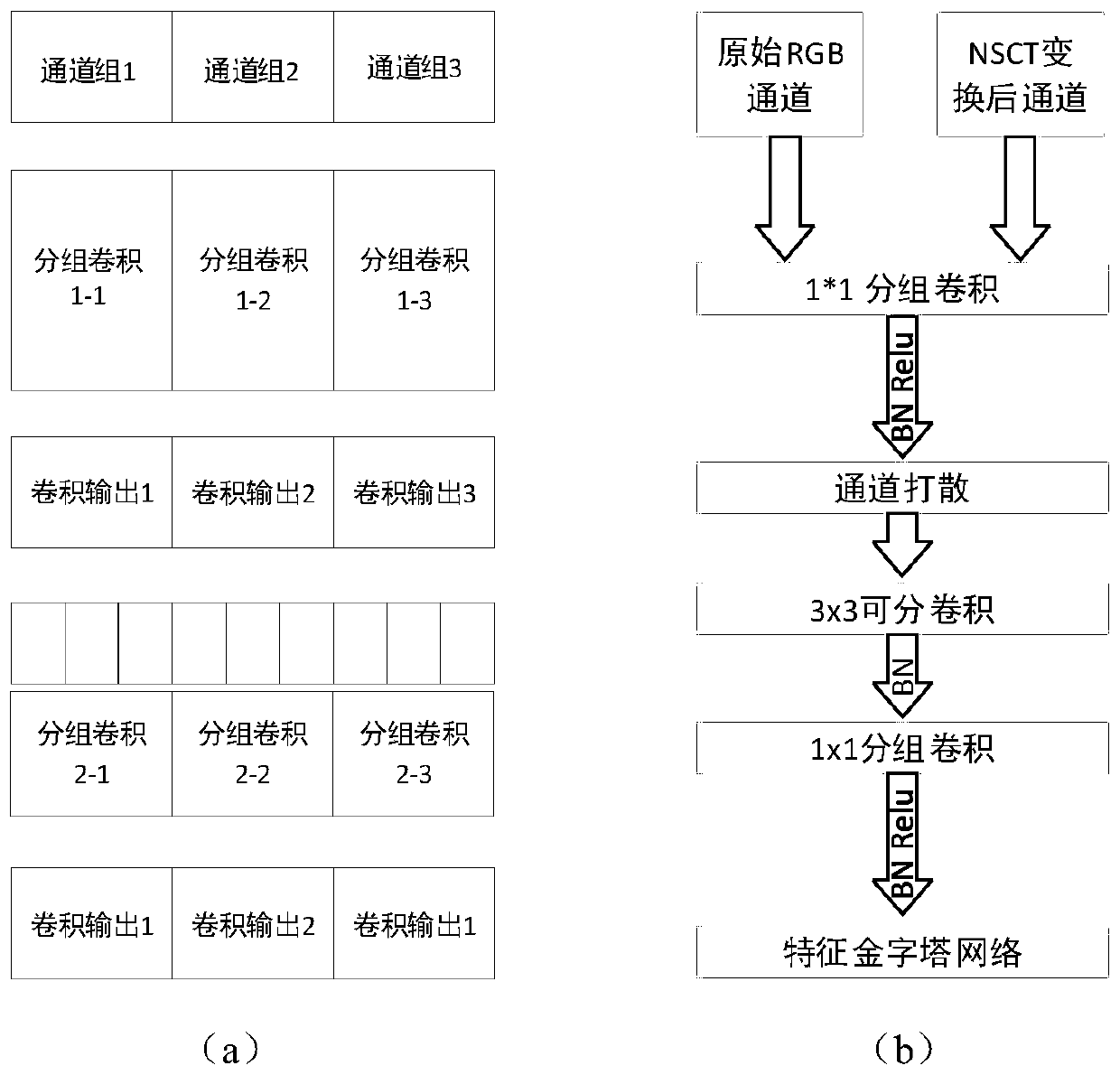
[0069] The optical remote sensing image target detection method based on the contourlet grouping feature pyramid convolution is the same as in embodiment 1, figure 2 (a) shows the detailed process of convolution implementation of group convolution in the present invention, figure 2 (b) shows a schematic diagram of the grouped convolution module of the present invention, which uses a 1×1 grouped convolution and a 3×3 separable convolutional convolution kernel to construct a grouped convolution module, and the grouped convolution module It is three layers, and its module structure is: input layer → first 1x1 group convolution → first 3x3 separable convolution layer → second 1x1 group convolution → output layer.
[0070] In this example, the specific parameters of the group convolution module are set as follows:
[0071] The first 1x1 group convolution in the group convolution module, the number of groups is 2, different groups use the image before edge enhancement and the ima...
Embodiment 3
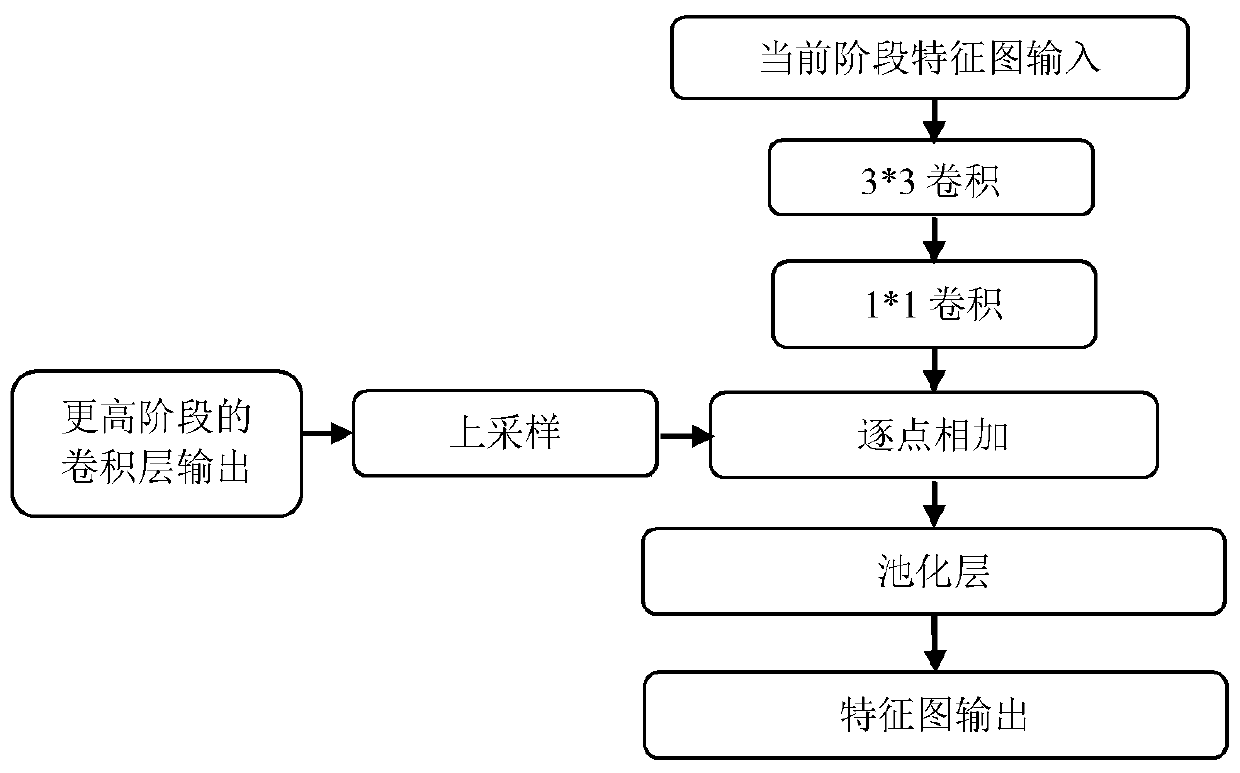
[0078] The remote sensing target detection method based on contourlet grouping feature pyramid convolution is the same as embodiment 1-2, and the residual connection convolution module described in step (4b) refers to: the feature map input layer of the previous stage→the first convolution Layer → second convolutional layer → third convolutional layer → point-by-point addition with output from feature map input layer → current stage feature map output layer.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com