

A wall-climbing robot with a mechanical pneumatic suction cup
A wall-climbing robot and mechanical technology, applied in the field of wall-climbing robots, can solve the problems of incoherent movement of wall-climbing robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further elaborated below in conjunction with illustrations and specific embodiments.
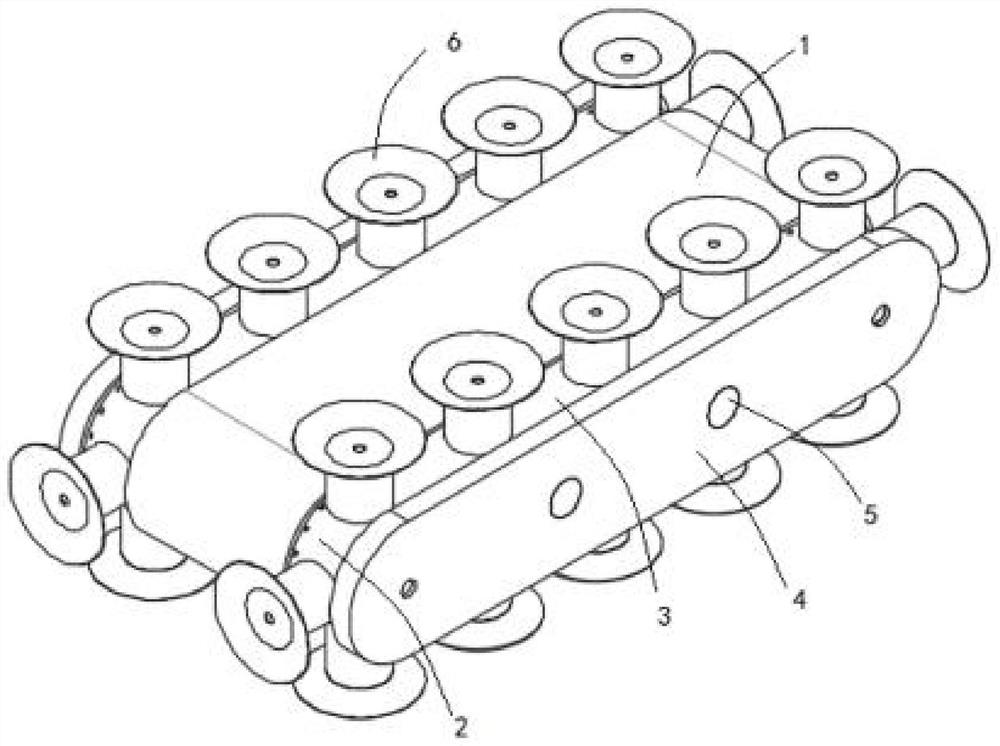
[0031] Such as Figure 1 to Figure 7 As shown, the present invention proposes a wall-climbing robot with a mechanical pneumatic suction cup, a wall-climbing robot with a mechanical pneumatic suction cup, including a frame 1, and the front and rear sides of the frame 1 are respectively provided with Two rotating wheels 2, the inner left and right sides of the frame 1 are fixed with biaxial stepping motors, the output shaft ends of the biaxial stepping motors are connected with the rotating wheels 2, and the two rotating wheels on one side The wheels 2 are connected by a belt 3, and the two rotating wheels 2 on the other side are also connected by a belt 3, and the outer side of the belt 3 is provided with a protective cover 4;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More