Six degrees of freedom wearable flexible-rope-driven exoskeleton-type upper limb rehabilitation training robot
A technique for rehabilitation training, flexible rope
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
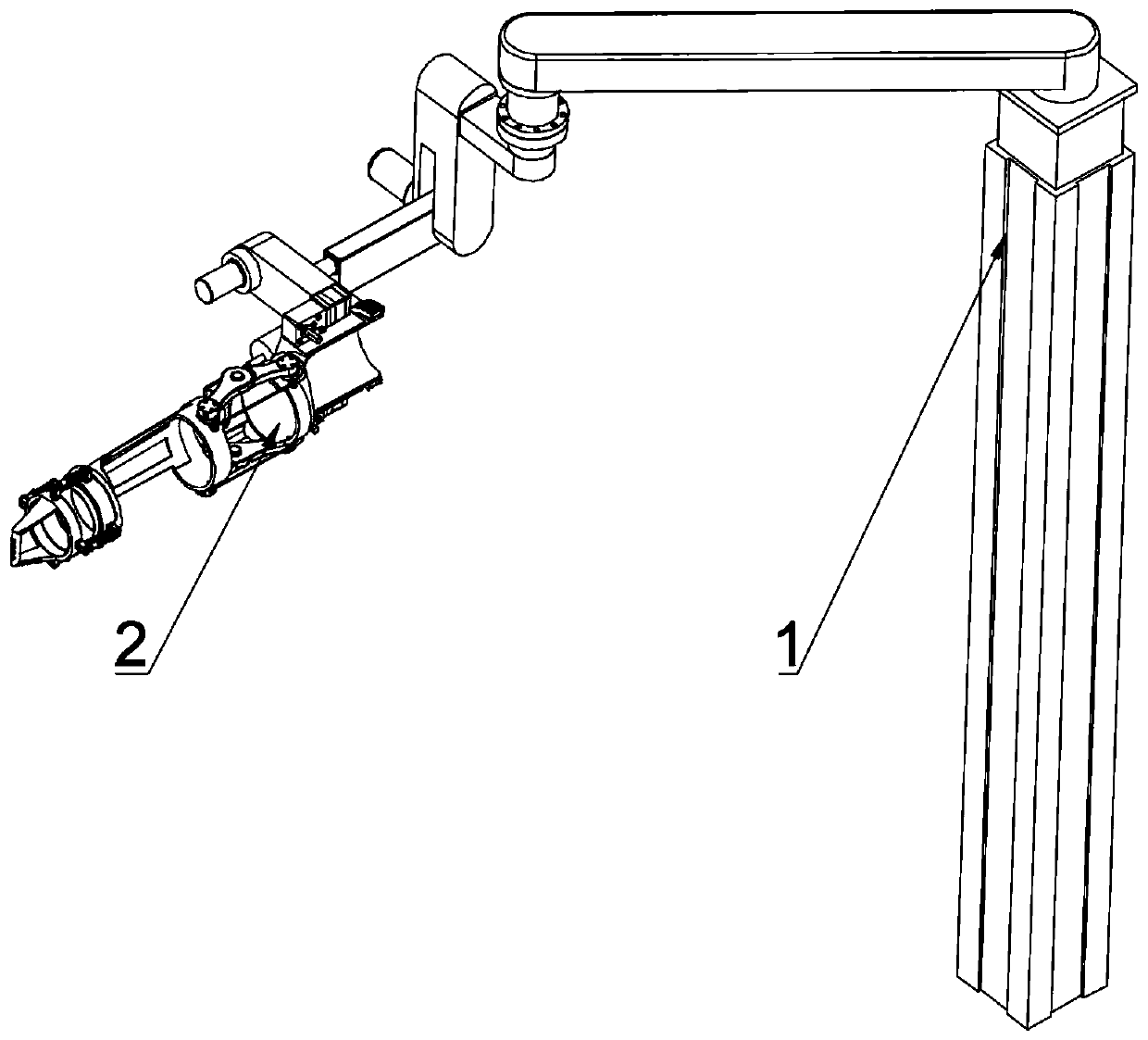
[0011] 1. See figure 1 , figure 2 , image 3 , a six-degree-of-freedom wearable flexible rope-driven exoskeleton upper limb rehabilitation training robot provided by the present invention, its composition includes: a ground support part 1 and a wearing part 2, wherein the column 101 in the ground support part 1 is connected to the ground by bolts , the arc guide rail module 112 in the ground support part 1 is connected with the big arm fixing device 214 in the wearing part 2 through screws.
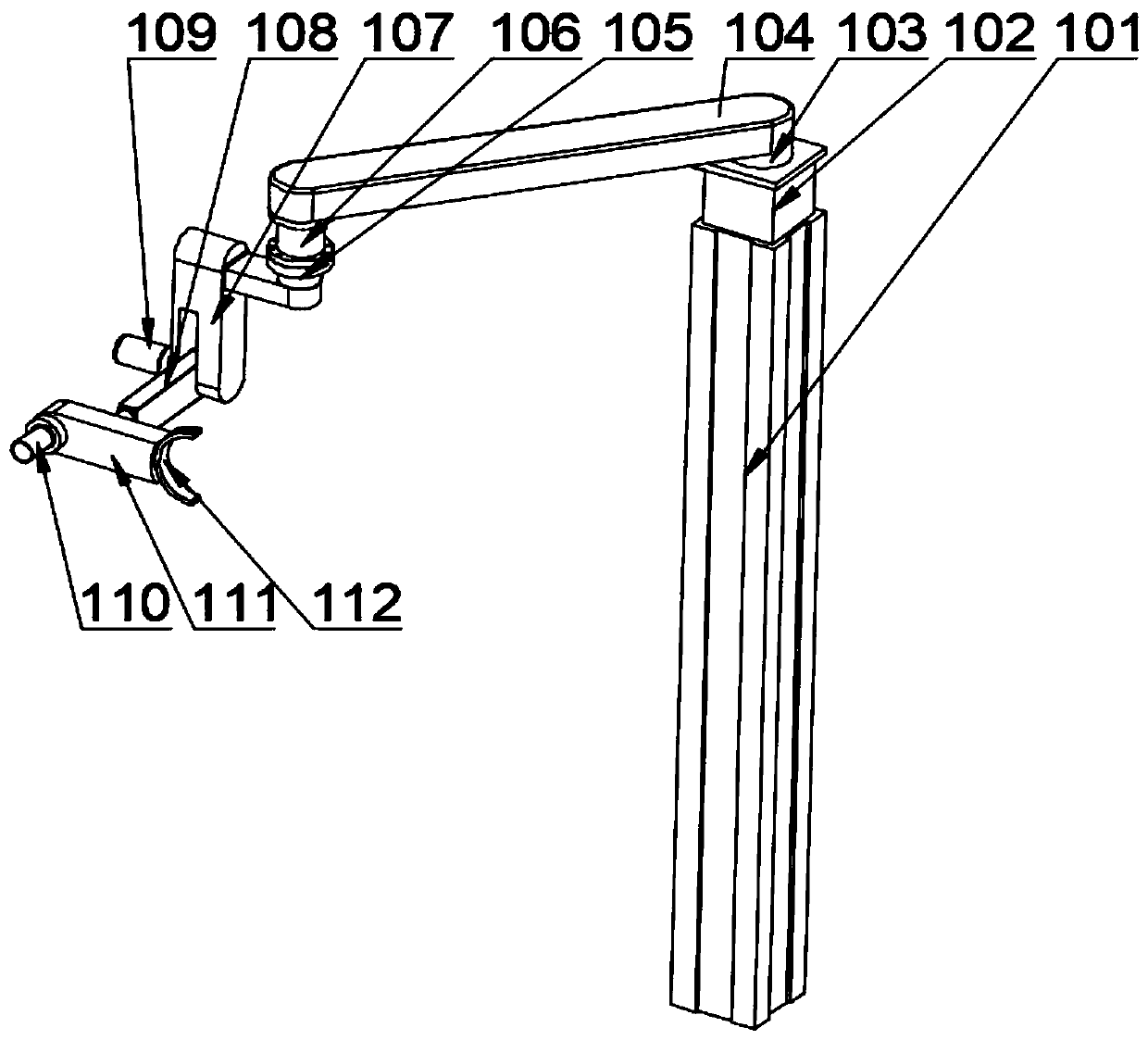
[0012] 2. See figure 2 , the ground support part 1 consists of a column 101, a height adjustment device 102, an angle adjustment device 103, a beam 104, a harmonic reducer 105, a disc motor 106, a shoulder transverse connector 107, a shoulder longitudinal connector 108, a harmonic reducer The motor 109, the servo motor 110, the reduction box 111 and the arc guide rail module 112 are composed, wherein the column 101 is connected to the ground by bolts, the height adjustment device 102...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More