

Multi-joint aged and disabled helping wheelchair mechanical arm and kinematical modeling method based on spinor theory
A modeling method and technology of a mechanical arm, which is applied in the field of service robots for the elderly and the disabled, can solve the problems of complex drive structure, volume and self-heavy, inconvenient installation and use, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
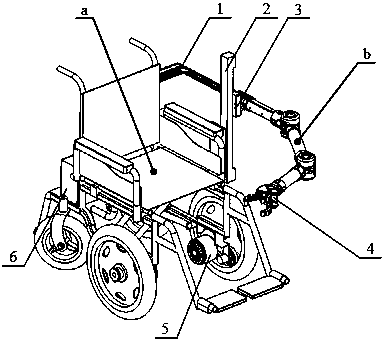
[0022] The following is attached Figure 1-4 The structure of a rope-driven mechanical arm for a wheelchair disclosed in the present invention, which can realize the tasks of helping the elderly and the disabled, and a kinematics modeling method for a wheelchair mechanical arm based on screw theory disclosed for the structural form of the wheelchair mechanical arm are carried out. Detailed description.
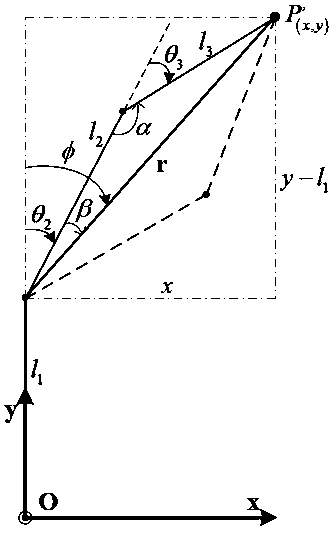
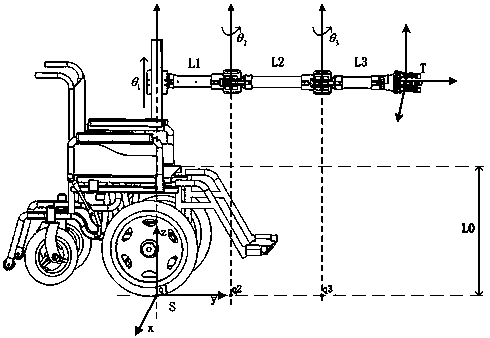
[0023] A multi-joint wheelchair robot arm for helping the elderly and the disabled and its kinematics modeling method based on screw theory, characterized in that the process of modeling and solving the forward kinematics and inverse kinematics of a wheelchair robot arm is based on screw It is realized on the basis of theory; the wheelchair mechanical arm is assembled by an electric wheelchair mobile platform (a) with a wheelchair driving motor (5) on the front wheel and a multi-joint light mechanical arm (b); wherein The mechanical arm (b) is installed directly above the lef...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More