

Multi-body-dynamics-equation solving method based on Bathe integration strategy
A dynamic equation and multi-body dynamics technology, applied in the field of mechanical dynamics, can solve the problems of unstable solution algorithm and low efficiency, and achieve the effect of improving convergence efficiency and efficient solution.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
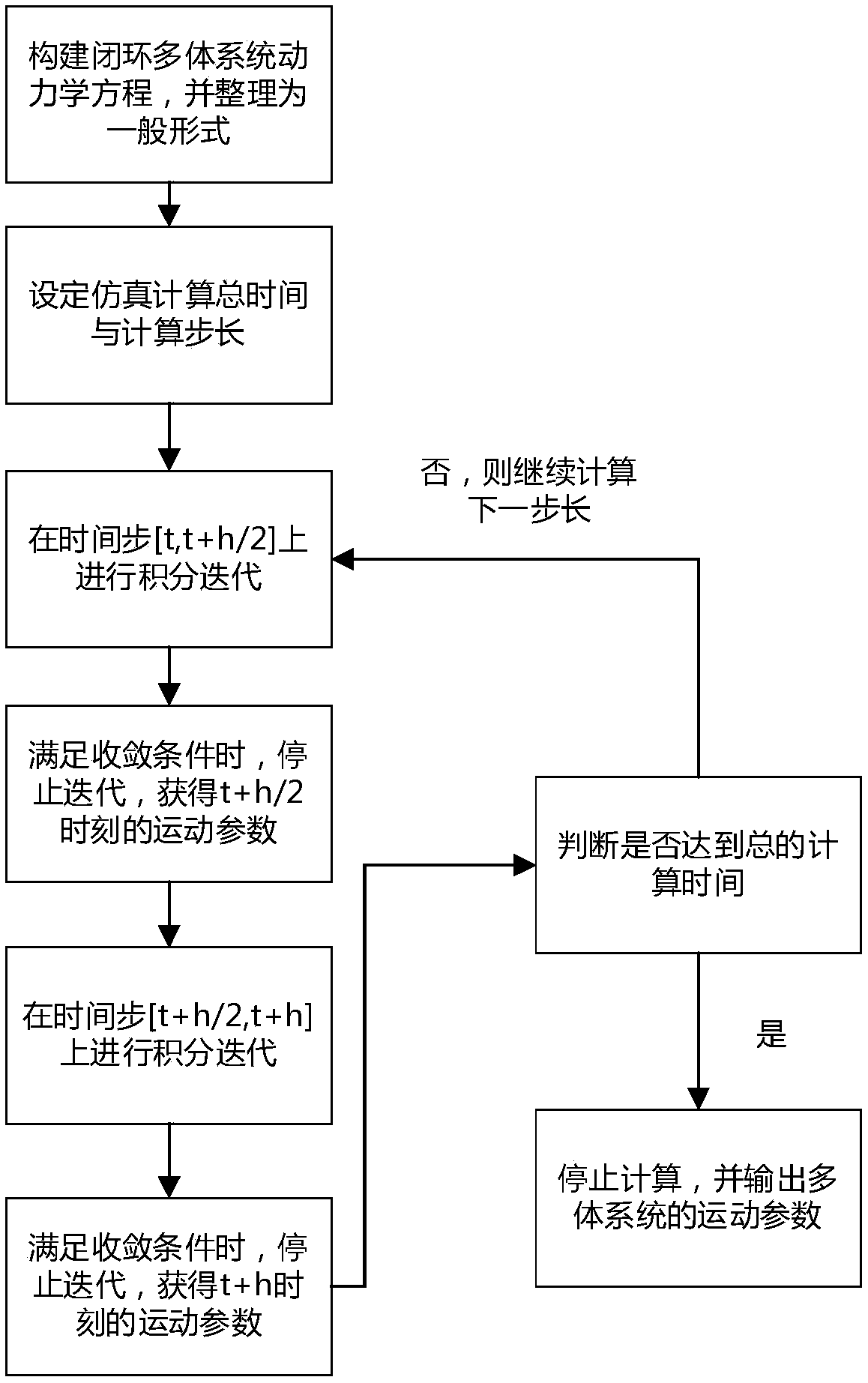
Method used
Image


Examples
Embodiment 1
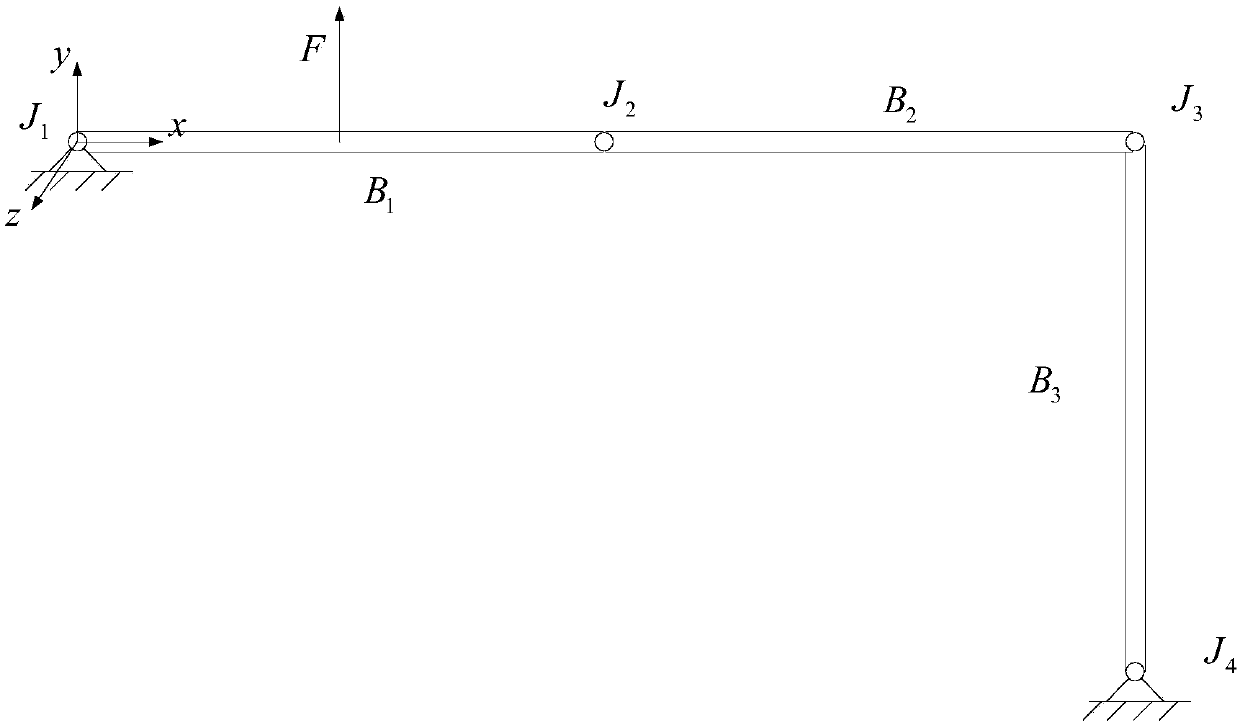
[0076] The method is further described in detail by the following examples. The following is a simulation example of this method. The example is a closed-loop multi-body system problem. The specific description is as follows:
[0077] Here, a closed-loop multi-body system with 3 rigid rods and 4 rotating hinges is selected. The specific structure is as follows figure 2 Shown, the first rotary hinge J 1 Connect the first ground rigid support to the first rigid pole B 1 , the second rotary hinge J 2 Connect the first rigid rod B 1 with the second rigid bar B 2 , the third rotating hinge J 3 Attach the second rigid bar B 2 with the third rigid bar B 3 , the fourth rotating hinge J 4 Connect the third rigid bar B 3 with the second ground rigid support; at the initial moment, the first rigid rod B 1 with the second rigid bar B 2 Horizontal arrangement, third rigid bar B 3 perpendicular to the second rigid bar B 2 Arrangement, third rigid bar B 3 located on the second...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More