Optimal Sequential Fusion Estimation Method for Nonideal Channels
A fusion estimation, non-ideal technology, applied in the field of communication, can solve the problem that the system cannot accurately obtain data fusion estimation results, etc., to improve the accuracy and robustness, reduce the possibility of divergence, and achieve high filtering accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
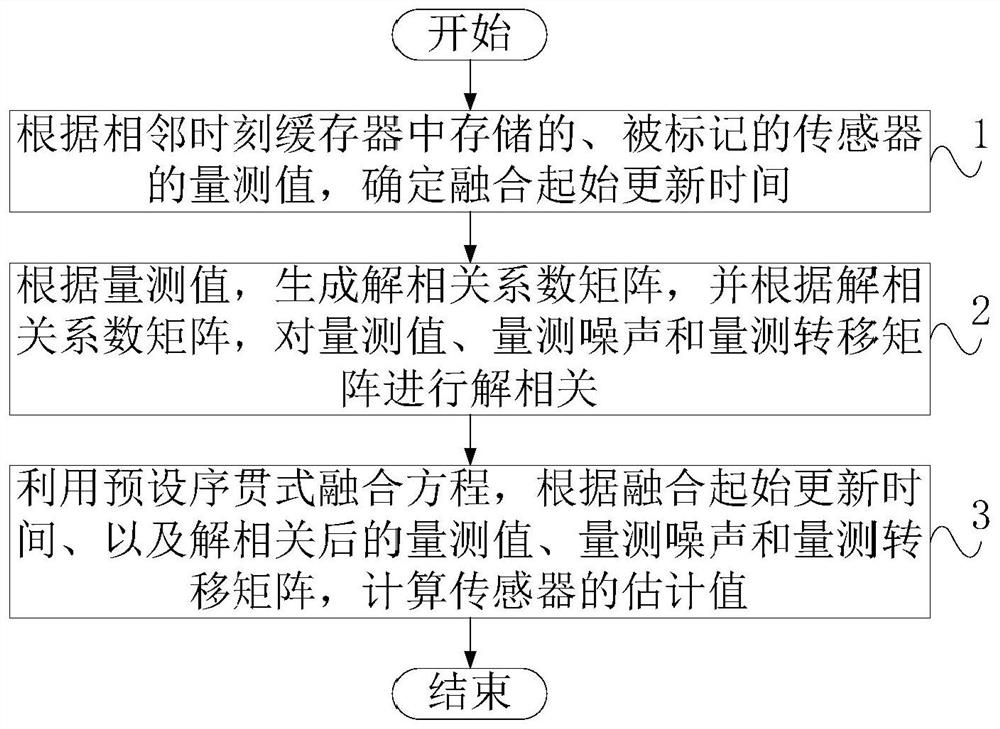
[0055] Such as figure 1 As shown, this embodiment provides an optimal sequential fusion estimation method under a non-ideal channel. This method is suitable for fusion calculation of estimated values of sensors in a discrete linear stochastic system. The method includes:
[0056] Step 1, according to the measurement value of the marked sensor stored in the buffer at the adjacent time, determine the fusion start update time τ;
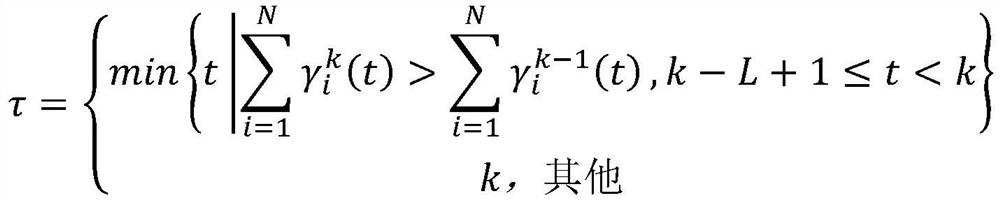
[0057] Further, the calculation formula for determining the fusion start update time τ is:
[0058]
[0059]
[0060] In the formula, τ is the fusion start update time, t is the measured value The time stamp of , i is the sensor label, i=1,2,…,N, is the measurement value of the i-th sensor at time stamp t stored in the buffer at time k tag value, L is the storage length of the buffer.
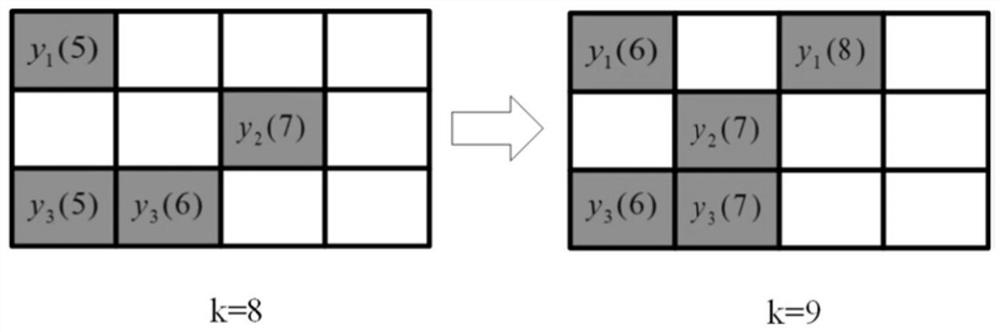
[0061] Specifically, the length of the buffer is set to L, and the marked measurement value is:
[0062]
[0063] In the formula, t=k-L+1,...,k.
[0...
Embodiment 2
[0112] This embodiment provides a sensor data calculation device, the calculation device includes a data receiving unit, a data processing unit and a data output unit, wherein,
[0113] The data receiving unit is used for receiving the measurement data of multiple sensors;
[0114] The data processing unit is configured to perform fusion calculation on the measurement data according to the optimal sequential fusion estimation method under the non-ideal channel disclosed in the first embodiment above;
[0115] The data output unit is used to output the fusion calculation result of the data processing unit.
[0116] The technical solution of this application has been described in detail above in conjunction with the accompanying drawings. This application proposes an optimal sequential fusion estimation method under a non-ideal channel, which is suitable for fusion calculation of estimated values of sensors in discrete linear stochastic systems. The method includes: step 1, d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More