

Unmanned aerial vehicle relay deployment method based on multi-detection unmanned aerial vehicle cooperative search
An unmanned aerial vehicle and multi-detection technology, applied in the field of unmanned aerial vehicle communication, can solve the problems of limited scope of application and difficulty in obtaining, and achieve the effects of wide application scope, high search accuracy and fast search speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
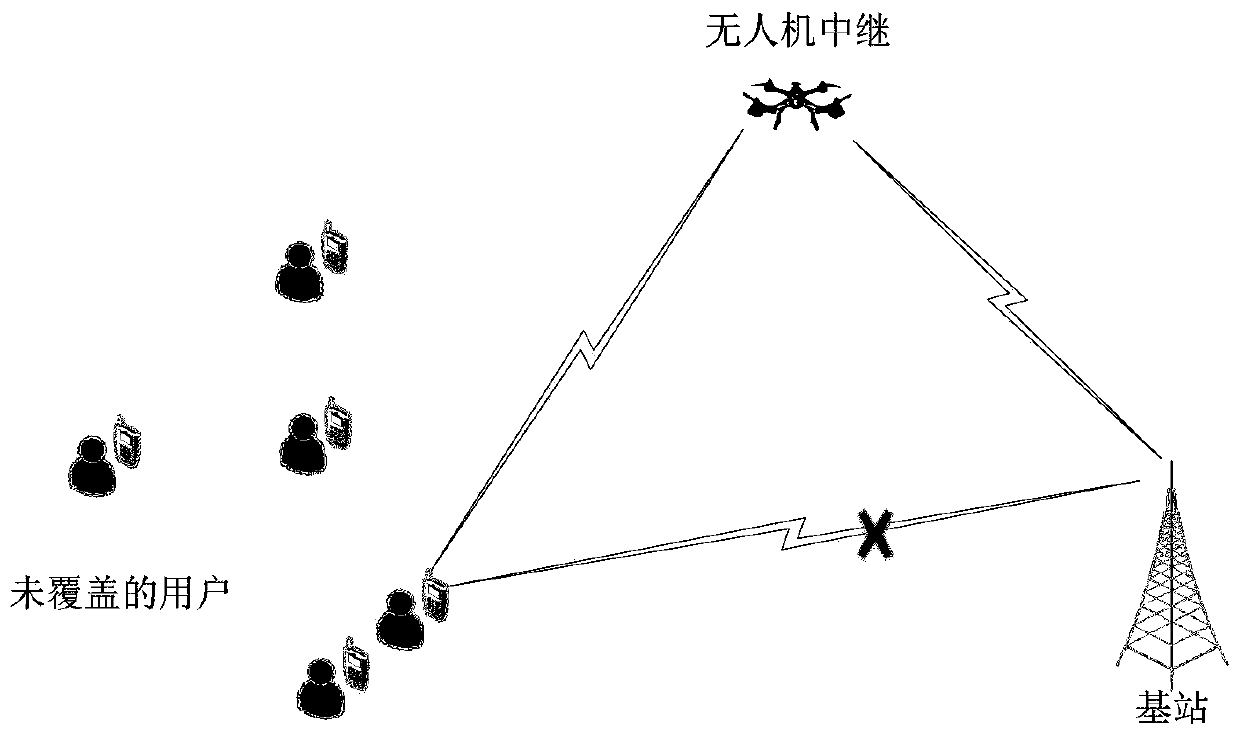
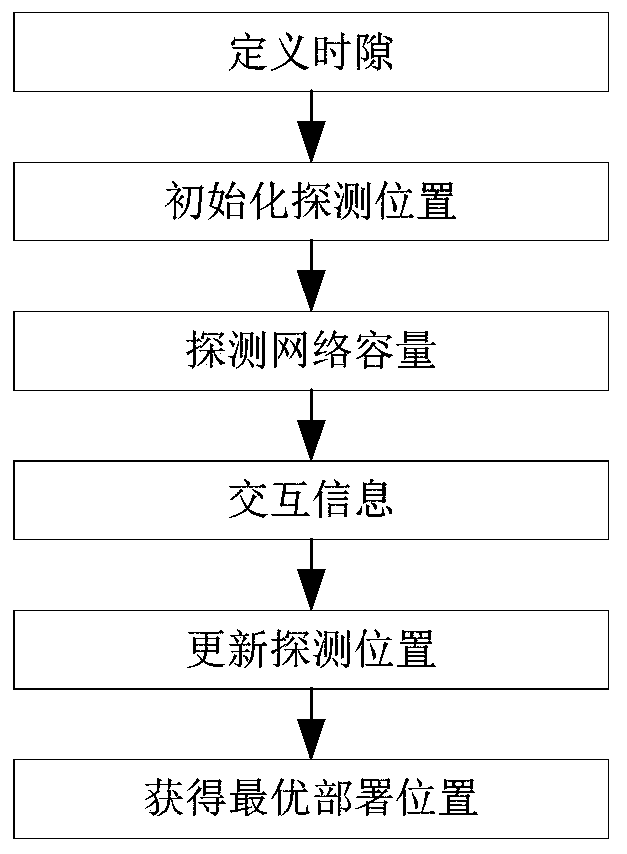
[0080] combine figure 1 , figure 2 , the present invention is based on the UAV relay deployment method of multi-detection UAV cooperative search, comprising the following steps:
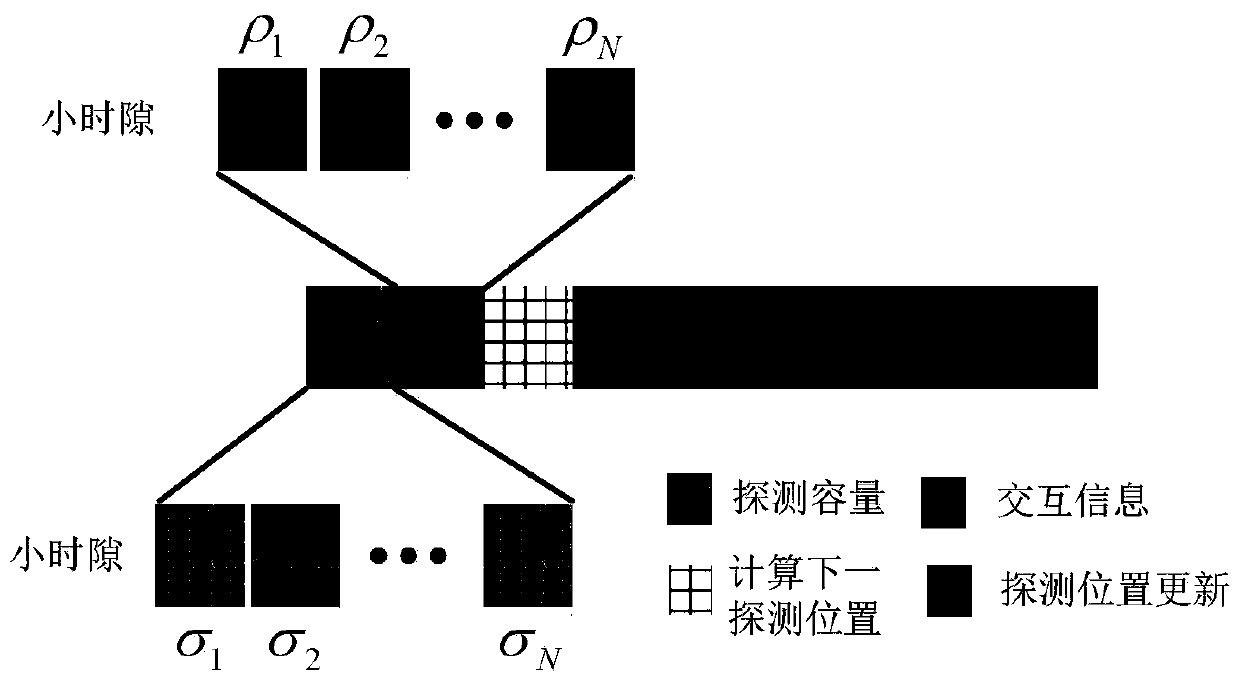
[0081] Step 1. Define time slot: discretize the time into the form of time slot, so that the detection UAV can perform corresponding actions in a specific time slot, combined with image 3 ,details as follows:
[0082] Step 1.1, discretize the time into the form of time slots, the time length of each time slot is equal, and record the current time slot as t;
[0083] Step 1.2. For any time slot, divide it into four parts. The first part is the detection time slot, which is used to detect the UAV detection network capacity, which is recorded as T D ; The second part is the interaction time slot, which is used to detect the interaction position and network capacity information between UAVs, denoted as T E ; The third part is the learning time slot, which is used to calculate the next detection pos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More