

Redundancy-degree-of-freedom mechanical arm visual servo obstacle avoiding system
A technology of visual servoing and manipulators, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of passive obstacle avoidance, inaccurate results of manipulator obstacle avoidance methods, methods that need to be trained in advance, and achieve wide application prospects Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
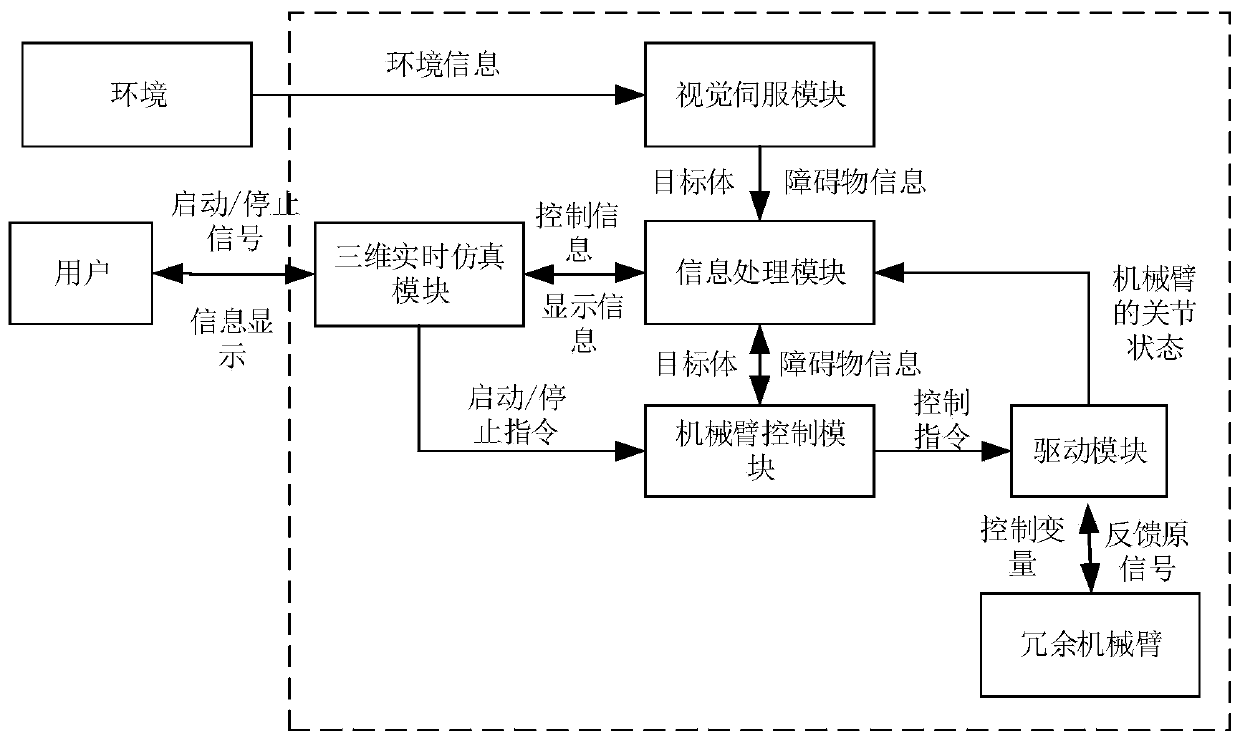
[0042] Such as figure 1 As shown, embodiments of the present invention provide a redundant degree of freedom manipulator visual servo obstacle avoidance system, including: a visual servo module, an information processing module, a manipulator control module, a drive module, and a three-dimensional real-time simulation module; wherein,
[0043] The driving module is used to realize the communication between the robotic arm control module and the redundant robotic arm to be controlled, drive the redundant robotic arm to operate according to the control instruction output by the robotic arm control module, and simultaneously The status information of each joint of the redundant mechanical arm is transmitted to the information processing module in real time;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More