

A class of parallel multimodal robotic dexterous hands
A technology of dexterous hands and robots, applied in the field of robotics, can solve the problems of limiting the wide application of dexterous hands, the carrying capacity of dexterous hands, the adaptability of workspace tasks, the operability of target objects and other performance indicators are not ideal, so as to improve the task adaptability , flexible in-hand operability, and high load-carrying capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] In order to further understand the kind of parallel multi-mode robot dexterous hand provided by the present invention, the present invention will be described in detail below in conjunction with the accompanying drawings and detailed embodiments.
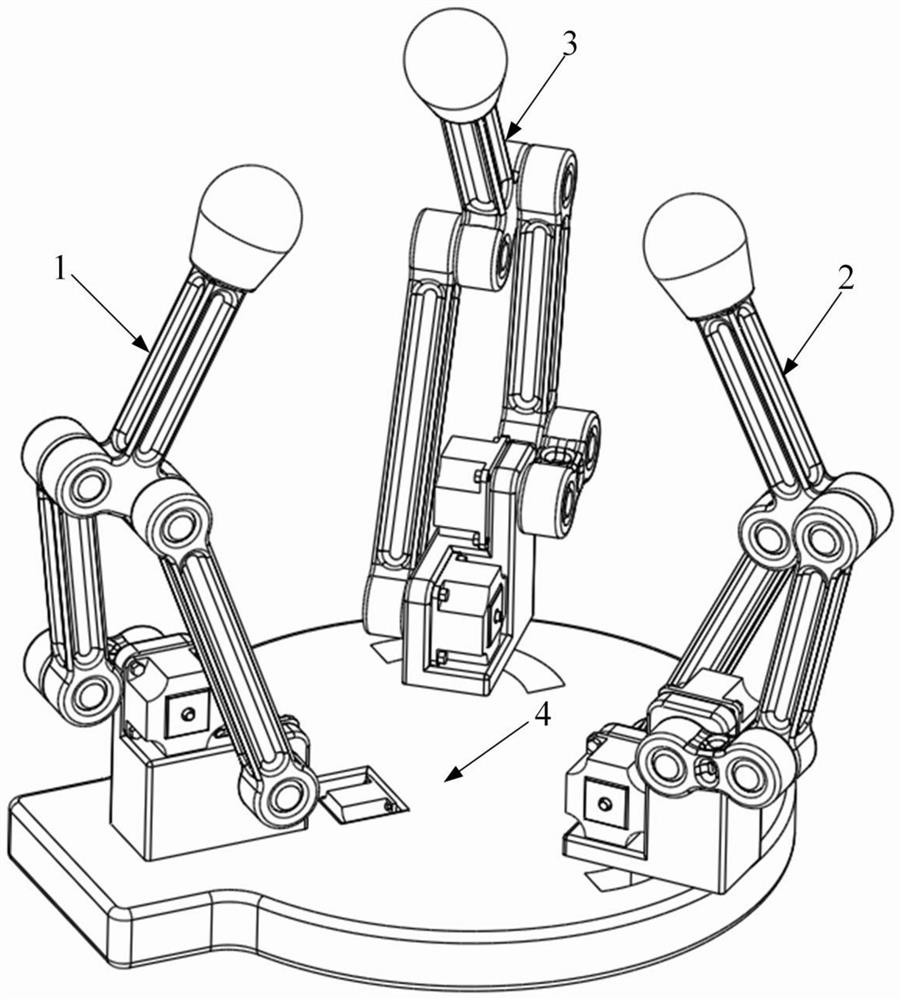
[0044] figure 1 A schematic diagram of the overall structure of the RR-RRR dexterous hand provided by the present invention, in figure 1 Among them, the dexterous hand includes the palm 4, the first finger 1 of the RR-RRR dexterous hand, the second finger 2 of the RR-RRR dexterous hand, and the third finger 3 of the RR-RRR dexterous hand.
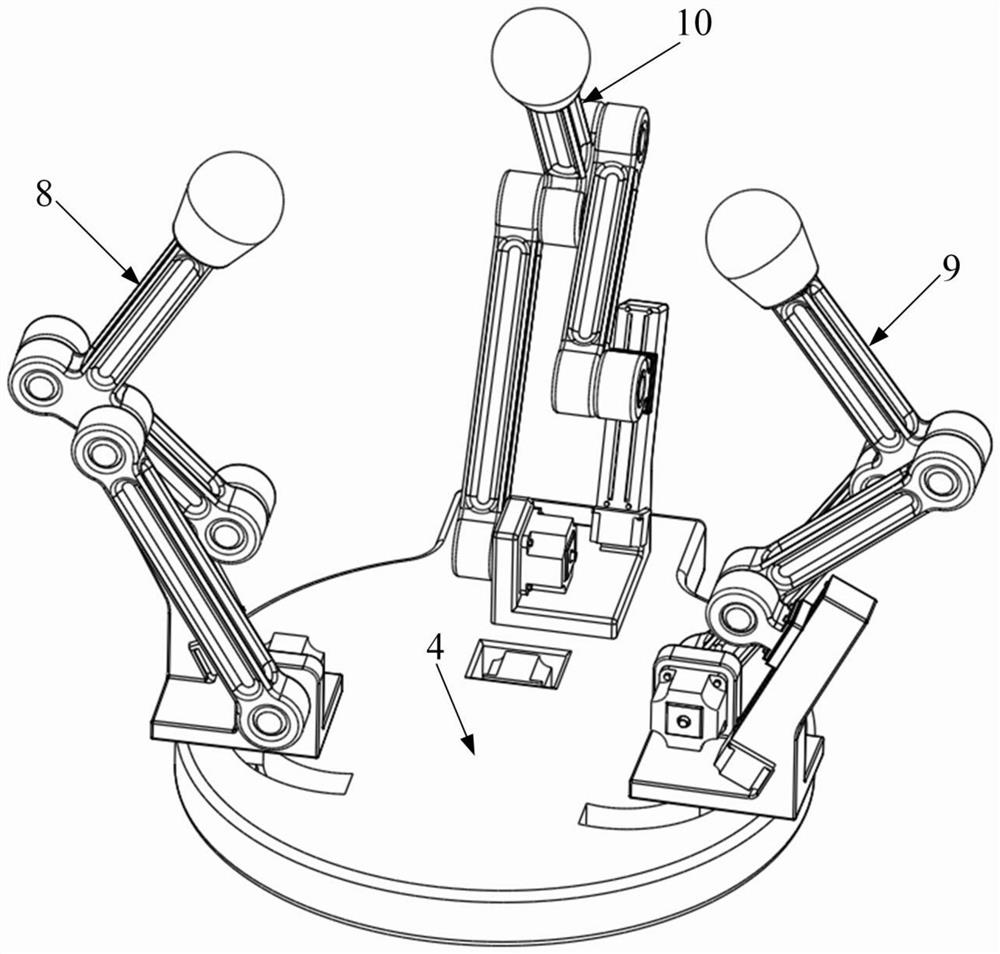
[0045] figure 2 A schematic diagram of the overall structure of the RR-RPR dexterous hand provided by the present invention, in figure 2 Among them, the dexterous hand includes the palm 4, the first finger 5 of the RR-RPR dexterous hand, the second finger 6 of the RR-RPR dexterous hand, and the third finger 7 of the RR-RPR dexterous hand.
[0046] image 3 A schematic diagram of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More