

Method for estimating installation error angle of optical pod of unmanned aerial vehicle
A technology for installing error angles and UAVs, which is applied in the field of UAV optical pods, can solve difficult and time-consuming problems, achieve the effects of reducing process requirements, simplifying installation procedures, and improving the accuracy of target positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be further described in detail below in conjunction with the accompanying drawings, so that those skilled in the art can implement it with reference to the description.
[0045] It should be understood that terms such as "having", "comprising" and "including" as used herein do not entail the presence or addition of one or more other elements or combinations thereof.
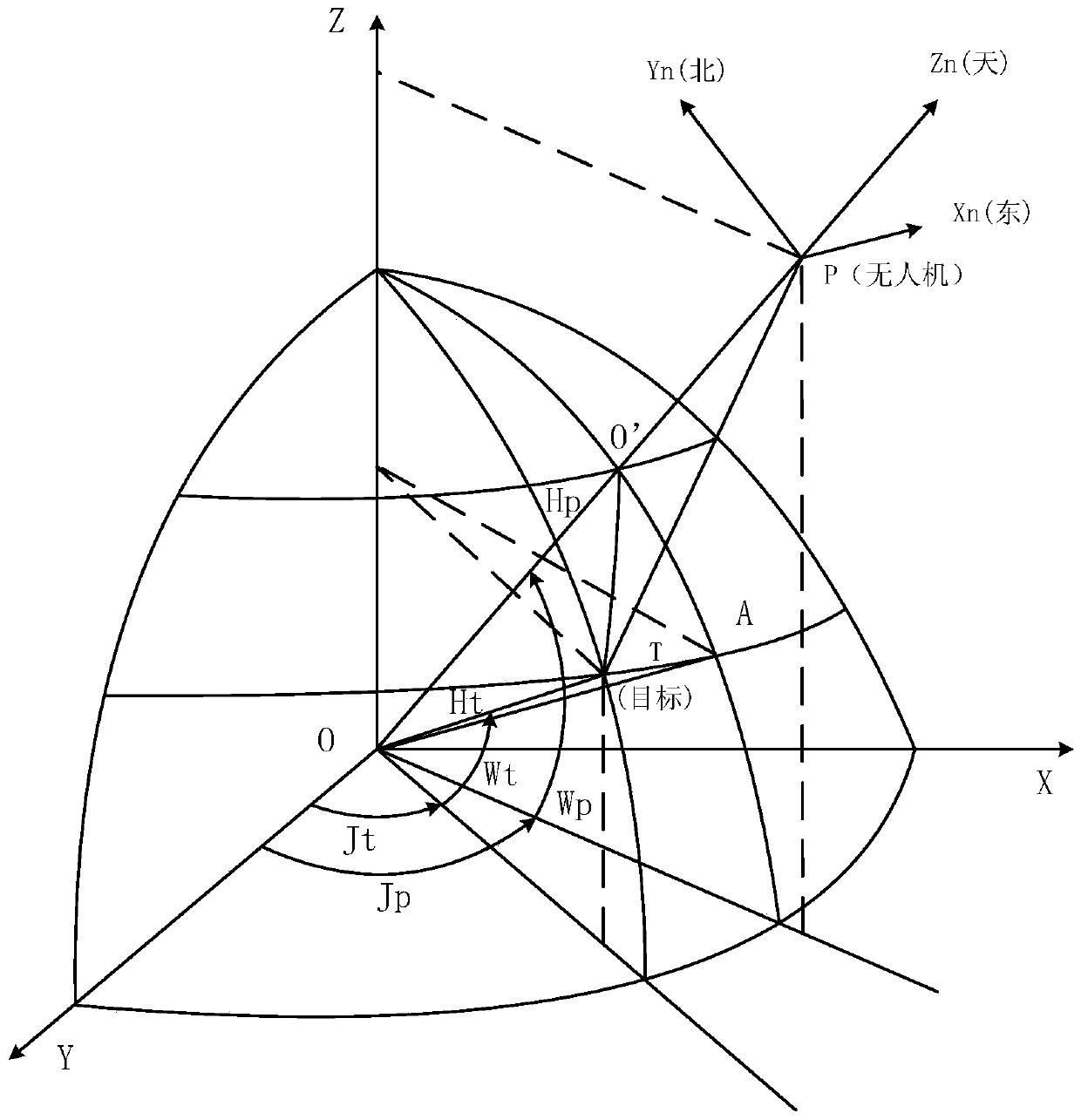
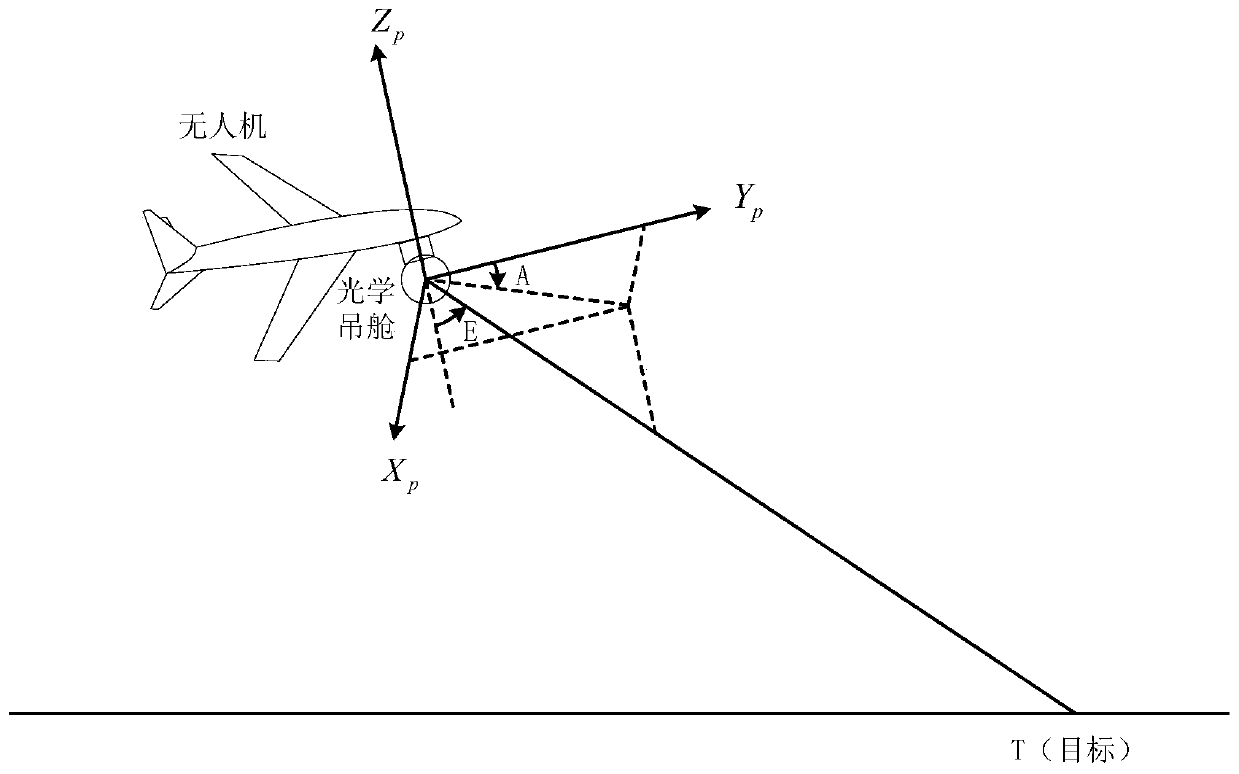
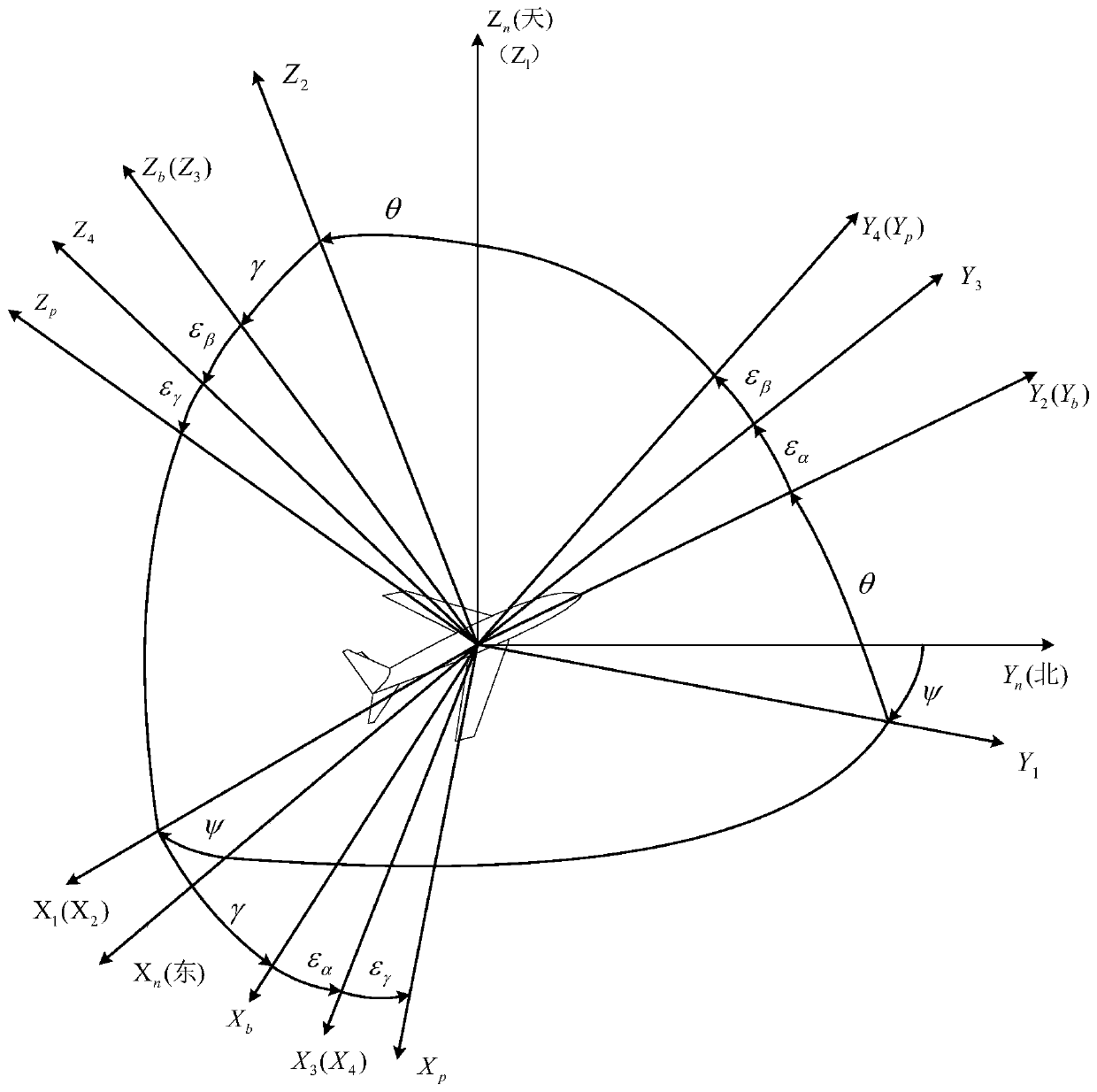
[0046] The invention provides a method for estimating the installation error angle of the optical pod of the UAV. During the flight of the UAV, the optical pod is used to lock a fixed target with known precise coordinates, and a mathematical model for solving the error angle of the installation of the optical pod is established. , according to the UAV coordinates, UAV attitude angle, optical pod pointing angle and laser ranging value at the time of optical pod laser ranging, the installation error angle of the optical pod is estimated by the multivariate Newton method, and the opt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More