

Azimuth-equivalent delay difference passive positioning method ofdouble circular arrays
A passive positioning and equivalent time delay technology, applied in positioning, measuring devices, instruments, etc., can solve the problems that the time delay difference estimation results are susceptible to noise interference, affecting positioning accuracy, equipment complexity and system cost increase, etc., to achieve Improve the accuracy of time delay estimation, improve positioning accuracy, and save costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0037] The technical solution adopted by the present invention to solve its technical problems comprises the following steps:
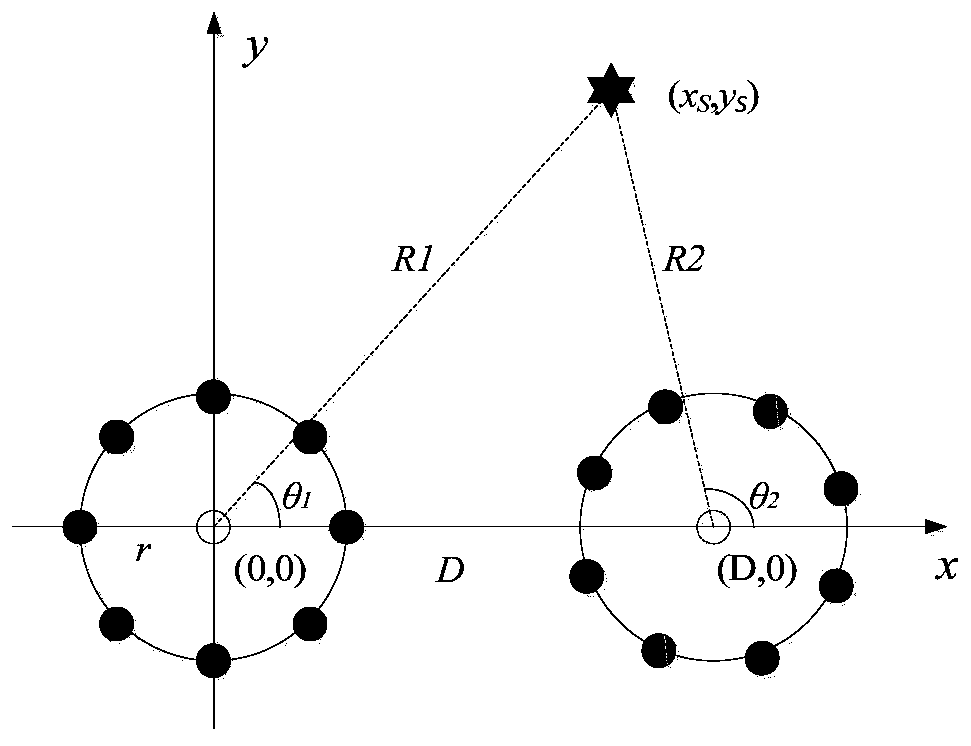
[0038] Step 1, establish a dual-array positioning space model, the number of elements of the two uniform circular arrays is both M (M is an even number), the center of the circular array is the array reference point, the radius of the circular array is r, and the distance between the two reference points is D. The direction of the line connecting the two reference points is the direction of the x-axis, and the direction of the vertical line of the line is the direction of the y-axis to establish a Cartesian coordinate system, then the coordinates of the reference points of the two circular arrays are respectively (x 1 ,y 1 ),(x 2 ,y 2 ), at (x s ,y s ) coordinates of the target sends a signal s(t), and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More