

Picking point positioning method
A positioning method and picking point technology, applied in the field of computer vision, can solve the problems of low detection accuracy, difficulty in finding shear picking points, and low picking efficiency, and achieve a complete positioning process, high target detection accuracy, and a wide range of applications Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
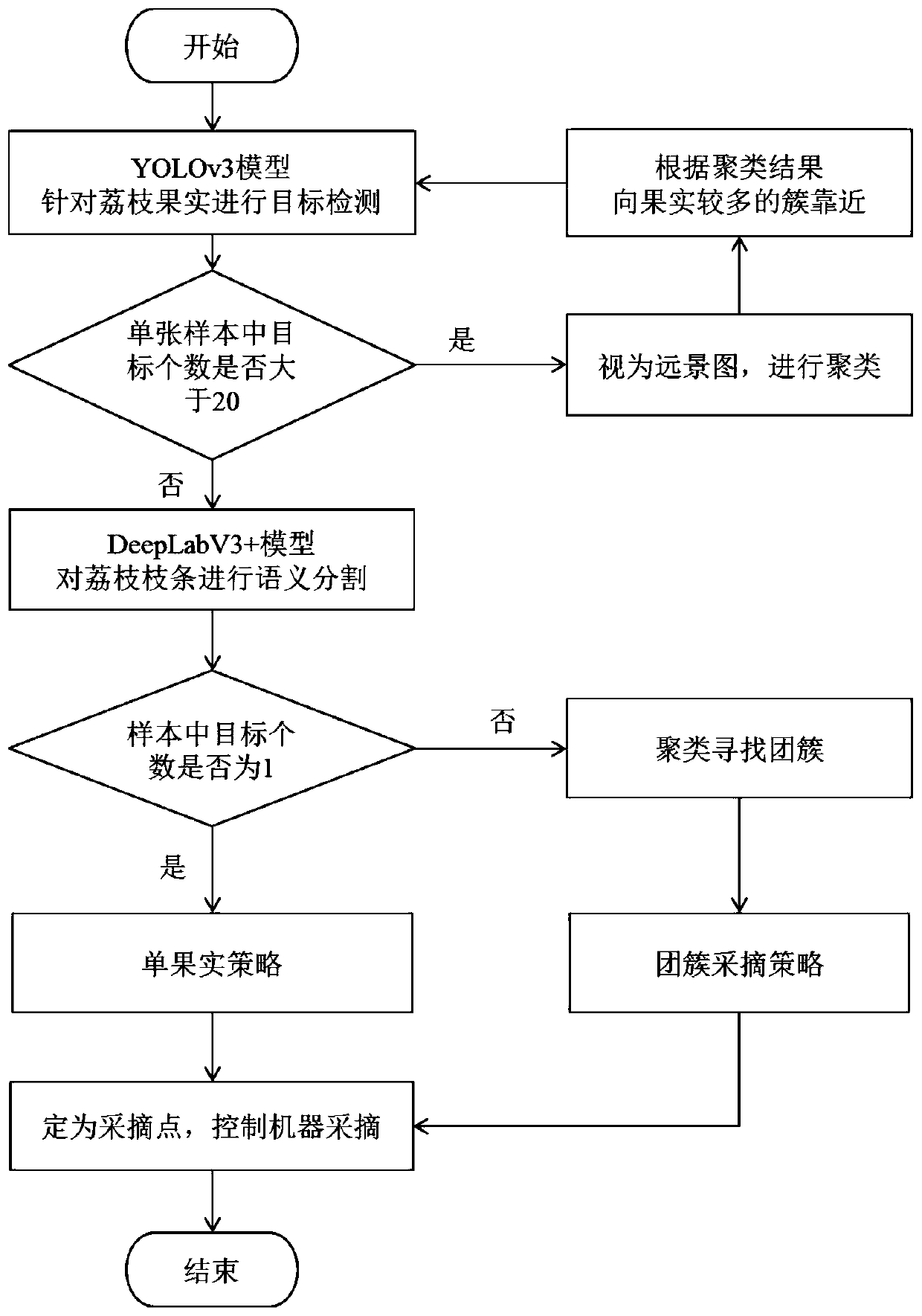
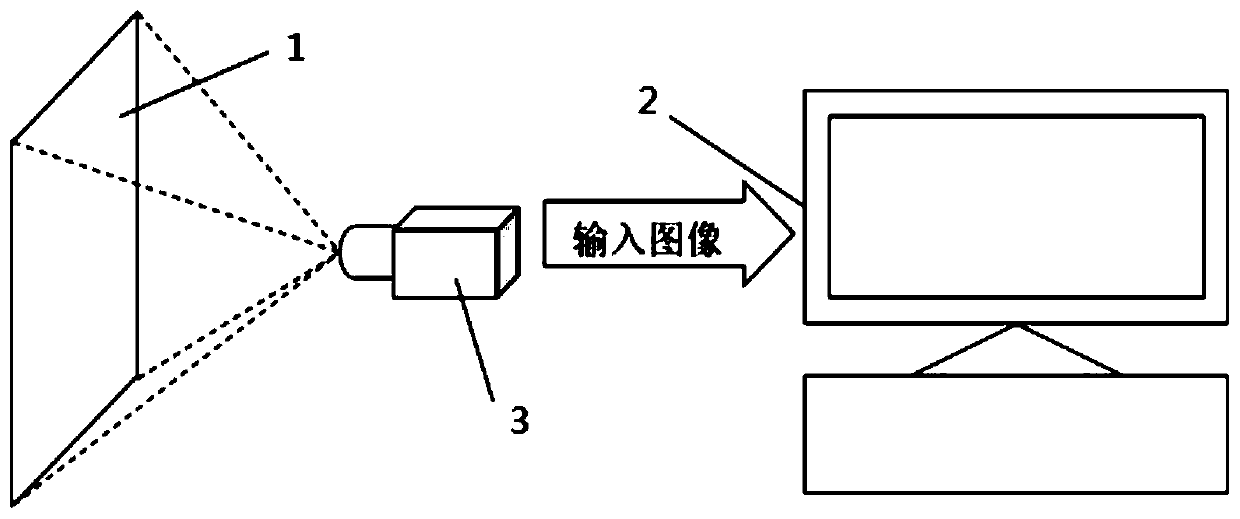
[0041] Such as figure 1 As shown, a positioning method based on picking points includes four aspects: 1. Field litchi image acquisition and data processing; 2. Model training of YOLO target detection algorithm; 3. DeepLab semantic segmentation model training; 4. OPTICS clustering and Related picking process.
[0042] 1. Image acquisition and data processing of wild litchi
[0043] The lychee images 1 in this experiment were taken by industrial cameras 3 respectively. The lychee varieties include Guiwei, Feizixiao, Huaizhi, and Nuomici. The weather conditions include rainy, cloudy and sunny days. The shooting time is from 8:00 to 17:00. The sampling data has a large difference, which is convenient to strengthen the robustness of the detection network and the difficulty of testing.
[0044] Because the experimental data is too large, it will bring unnecessary space and time costs to the network and data copy, so on the basis of the original data, the resolution of the picture ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More