

A Depth Camera Localization Method Based on Convolutional Neural Network
A convolutional neural network and depth camera technology, applied in the field of robot vision positioning, can solve problems such as positioning failure, loss of information, and inability to fully extract unstructured point cloud features, and achieve improved convenience, deployment and use Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to further understand the present invention, the preferred embodiments of the present invention are described below in conjunction with examples, but it should be understood that these descriptions are only to further illustrate the features and advantages of the present invention, rather than limiting the claims of the present invention.
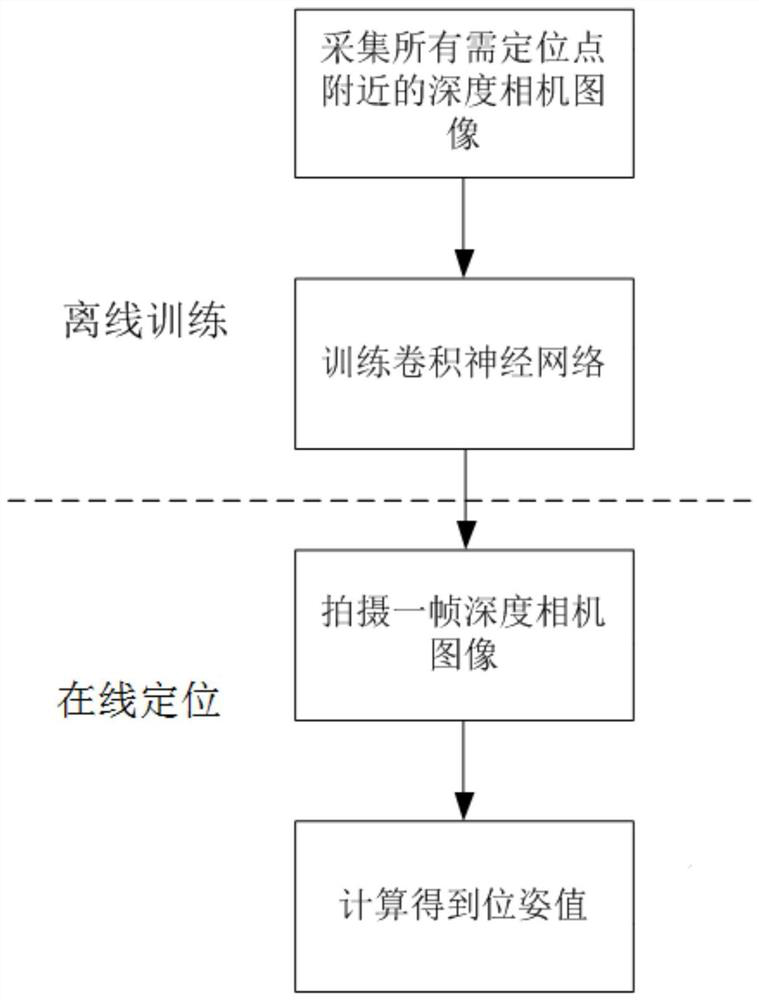
[0039] An embodiment of the present invention provides a method for positioning a depth camera based on a convolutional neural network. The color image acquired by the depth camera is fused with the depth image as input, and the pose of the camera is calculated.
[0040] In this embodiment, a convolutional neural network capable of fusing input color image and depth image information and outputting image shooting poses is firstly established.
[0041] Specifically, the convolutional neural network proposed in this embodiment is composed of a graph fusion generation module and a graph neural network module.
[0042] In this e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More