

A Distributed Volumetric Kalman Filter Collaborative Localization Method Based on Confidence Transfer
A technology of confidence transfer and Kalman filtering, which can be used in location-based services, wireless communication, network topology, etc., and can solve problems such as high computational complexity, high energy consumption, and large sensor resources.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0037] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
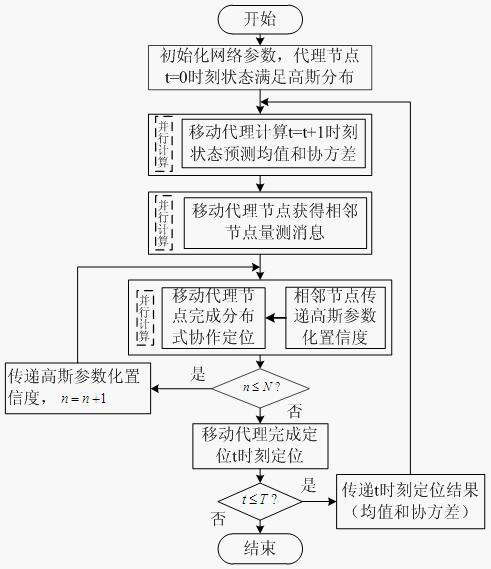
[0038] Such as figure 1 Shown, the present invention comprises the following steps:
[0039] (1) Construct a distributed mobile agent node cooperative positioning network model, initialize the network parameters, the number of confidence iterations, the known reference node position, and the prior information of the mobile agent node state satisfy the Gaussian distribution; first, initialize the network parameters, t=0 time , the set of known reference node p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More